

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
We have B-frame and N-frame, where {b,b2, b3} and {, 2, ^3} are right-handed vector bases fixed in B-frame and N-frame, respectively. The orientation

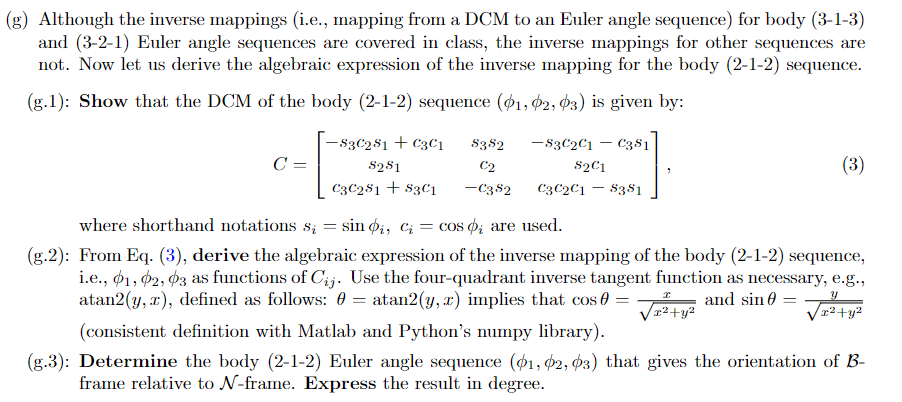
We have B-frame and N-frame, where {b,b2, b3} and {, 2, ^3} are right-handed vector bases fixed in B-frame and N-frame, respectively. The orientation of B-frame relative to N-frame is expressed by a single rotation parameterized by {0, }, where and represent the rotation axis and angle, respectively. Suppose that {0, } are given by: = 1 = n + = n 2 121131 0 = 3 (2) (g) Although the inverse mappings (i.e., mapping from a DCM to an Euler angle sequence) for body (3-1-3) and (3-2-1) Euler angle sequences are covered in class, the inverse mappings for other sequences are not. Now let us derive the algebraic expression of the inverse mapping for the body (2-1-2) sequence. (g.1): Show that the DCM of the body (2-1-2) sequence (p1, 02, 03) is given by: C -83C281 + C3C1 $281 C3C281 +83C1 $382 -83C2C1 C381 C2 -C382 82C1 C3C2C1 - 8381 (3) where shorthand notations s; = sin oi, ci = = cos o are used. (g.2): From Eq. (3), derive the algebraic expression of the inverse mapping of the body (2-1-2) sequence, i.e., 01, 02, 03 as functions of Cij. Use the four-quadrant inverse tangent function as necessary, e.g., atan2(y,x), defined as follows: 0 = atan2(y,x) implies that cos and sin x+y I y = x + y (consistent definition with Matlab and Python's numpy library). (g.3): Determine the body (2-1-2) Euler angle sequence (01, 02, 03) that gives the orientation of B- frame relative to N-frame. Express the result in degree. -
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Introduction to Algorithms
Authors: Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest
3rd edition
978-0262033848