

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
We will consider Example 3.5 in MLS (inverse kinematics of the elbow manipulator). Assume l0 = l = l = 1. And the desired
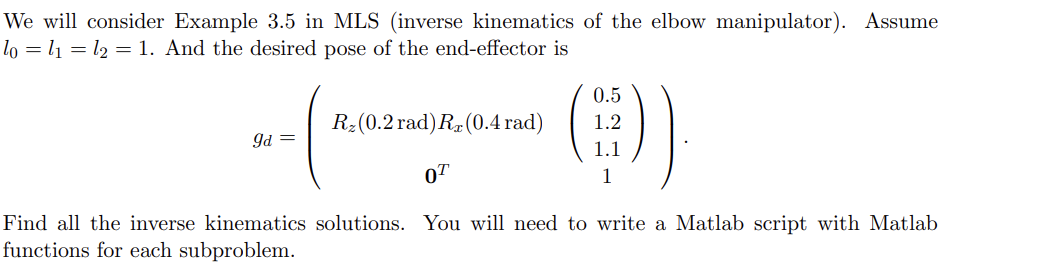
We will consider Example 3.5 in MLS (inverse kinematics of the elbow manipulator). Assume l0 = l = l = 1. And the desired pose of the end-effector is 0.5 Rz (0.2 rad) R (0.4 rad) 1.2 Id = Find all the inverse kinematics solutions. You will need to write a Matlab script with Matlab functions for each subproblem.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Introduction To Statistical Quality Control
Authors: Douglas C Montgomery
7th Edition
1118146816, 978-1-118-3225, 978-1118146811