

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
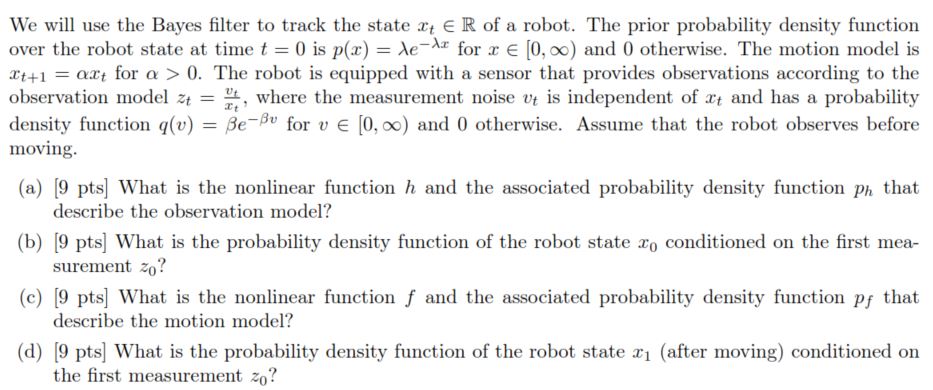
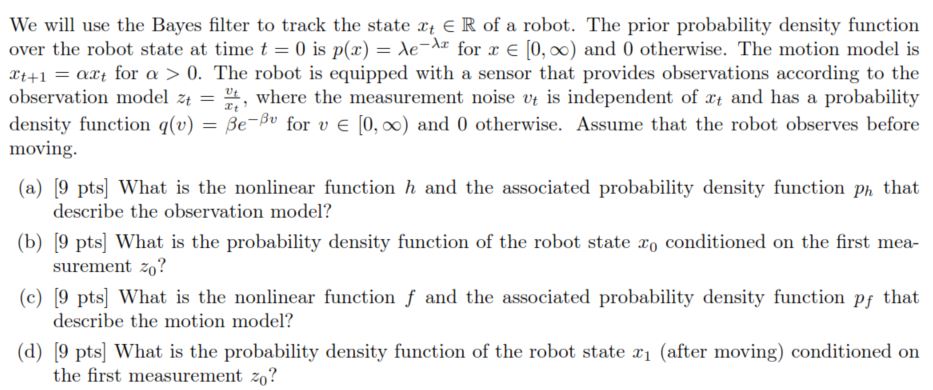
We will use the Bayes filter to track the state It E IR of a robot. The prior probability density mction over the robot state
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Mathematics For The Liberal Arts
Authors: Donald Bindner, Martin J Erickson, Joe Hemmeter
1st Edition
1118371747, 9781118371749