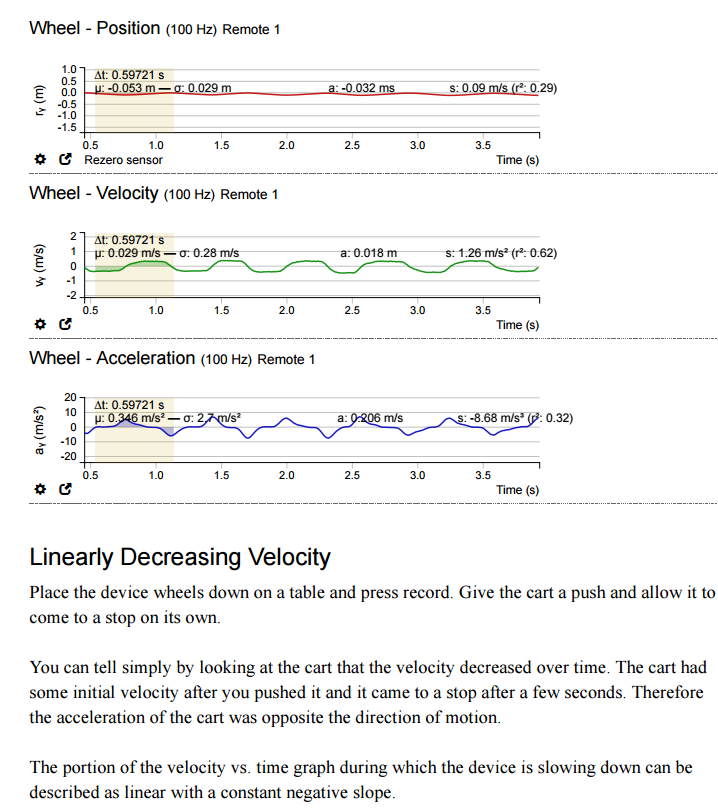
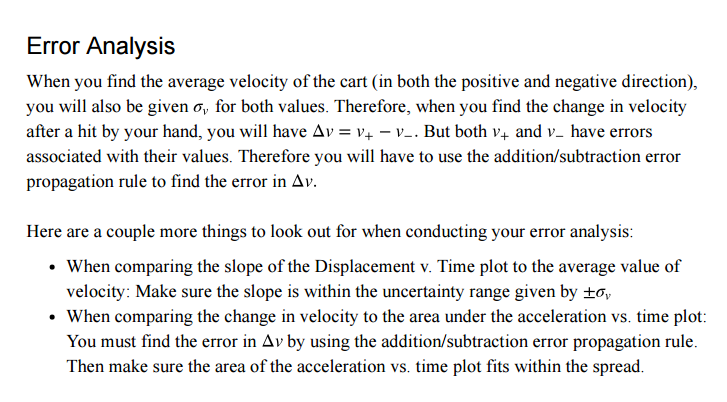
Wheel - Position (100 Hz) Remote 1 197 stosar2is 00 - -0.053 m g: 0. =0 0. r*: 0.29) = .05 = 10 -15 | 0.5 1.0 1.5 20 25 3.0 (4 Rezerosensor _ 2] avosgr21s 2 ; 1 0.029 mis 02 0:28 mis a:0.018m 5:1.26 mis (1% 0.62) 5 4 2 T 1 0.5 10 1.5 20 25 3.0 35 o Time (s) :10.32) T 1 0.5 1.0 1.5 20 25 a0 35 o Time (s) Linearly Decreasing Velocity Place the device wheels down on a table and press record. Give the cart a push and allow it to come to a stop on its own. You can tell simply by looking at the cart that the velocity decreased over time. The cart had some initial velocity after you pushed it and it came to a stop after a few seconds. Therefore the acceleration of the cart was opposite the direction of motion. The portion of the velocity vs. time graph during which the device is slowing down can be described as linear with a constant negative slope. Error Analysis When you find the average velocity of the cart (in both the positive and negative direction), you will also be given o, for both values. Therefore, when you find the change in velocity after a hit by your hand, you will have Av = v, v_. But both v, and v_ have errors associated with their values. Therefore vou will have to use the addition/subtraction error propagation rule to find the error in Av. Here are a couple more things to look out for when conducting your error analysis: When comparing the slope of the Displacement v. Time plot to the average value of velocity: Make sure the slope is within the uncertainty range given by +a, * When comparing the change in velocity to the area under the acceleration vs. time plot: You must find the error in Av by using the addition/subtraction error propagation rule. Then make sure the area of the acceleration vs. time plot fits within the spread. Error Analysis 'When you find the average velocity of the cart (in both the positive and negative direction), you will also be given for both values. Therefore, when you find the change in velocity after a hit by your hand, you will have But both and have errors associated with their values. Therefore you will have to use the addition/subtraction error propagation rule to find the error in Here are a couple more things to look out for when conducting your error analysis: * When comparing the slope of the Displacement v. Time plot to the average value of velocity: Make sure the slope is within the uncertainty range given by * When comparing the change in velocity to the area under the acceleration vs. time plot: You must find the error in by using the addition/subtraction error propagation rule. Then make sure the area of the acceleration vs. time plot fits within the spread. What to include in your lab reports Explain all calculations. Do your results match expectations? Explain. This question is especially important for this lab. Explain why each plot looks the way it does and how they relate. Error Analysis Explain all plots and what information you gathered from them! Questions 1. What does the Accelerometer read when the device is sitting on the table? 2. What about when the device was in free-fall? Does this make sense in relation to question 1?7 Now ask yourself if the plots for displacement vs. time and acceleration vs. time make sense in relation to the velocity vs. time graph. If the velocity vs. time graph has a constant slope (remember the slope of the velocity vs. time graph is equal to the acceleration during that time period) the acceleration vs. time plot will be a straight horizontal line. (If you zoom in vertically on the acceleration vs. time plot, you can see that the acceleration is non-zero during the time interval during which the velocity is changing.) The displacement vs. time graph is a bit trickier. Since the velocity is changing over time, even though the overall position is increasing, the rate of change of displacement is changing over time. Therefore, the slope of the displacement vs. time graph will change as a function of time. Since the velocity is decreasing in this case, the slope should also decrease. This means that the displacement vs. time graph will be curved until it reaches a constant value (where the device has stopped and the position is not changing). Make sure you understand the plots and how they are connected before moving on. Here is a sample set of data: Wheel - Velocity (100 Hz) Remote 1 At 179000 5 p:0.158 m/s . 0.086 m's a:-0.28 m/s s:0.16 m/s (r: 1.00) v, (m/fs) Wheel - Acceleration (100 Hz) Remote 1 At 1.79000 s g w0163 ms o 0048 m/s? a:0.29m/s s -0.01 m/s\" 0.01) o B :; E'_ 5 AVERAGE (accel) Area (accel) + -7 -8 F T T T T T T T T T T T T T T 018 18 20 22 24 26 28 0 iz 34 EL a8 40 43 o Time (&) Note that we have zoomed this graph both vertically and horizontally so that the data fills the chart in a manner that 1s comfortable to read. Furthermore, we have "smoothed" the data somewhat (here by 9) so that the random fluctuations are reduced. After zooming, we entered "Analysis Mode" and highlighted a time region during which the velocity was linearly decreasing toward zero. In analysis mode, the software calculates average, area, and slope on every graph. This data will then allow us to test and verify two relations: A a, = % laccel. = slope of v vs. 1] vvg=a, At [Avelocity = area under a vs. t] Test these relations for values taken from your own data. Be certain to include a plot similar to that above from your own data, extraction of key parameters into a table, and a clear discussion of how you handled these numbers to either prove or disprove the derivative and integral relations between velocity and acceleration. Note that if you do not like how your data looks, you can hit the [Remove] button above the plots and re-take your data. Wheel - Position (100 Hz) Remote 1 057 At 0.97000' T 00 - =0 > D5 T 1 10 15 20 25 30 35 40 45 5.0 55 @ ( Rezerosensor Time (s) 1 10 15 20 25 30 35 40 45 5.0 55 & Time (s) 1 1.0 15 20 25 3.0 as 40 45 50 55 & Time (s) Back and Forth Motion: Linearly Position Change The following video shows what you will be doing during the lab. You will be doing a similar analysis to what you did in the previous slide, with different motion. Wheel - Position (100 Hz) 0.4 0.3 0.2 0.1 -0.0 -0.1 -02 -0.3 5 6 7 10 11 Time (s) Wheel - Velocity (100 Hz) 2.0 1.5 1.0 0.5 Vy (m/s) 0.0 -0.5 -1.0 5 6 7 10 11 Time (s) Wheel - Acceleration (100 Hz) ay (m/s') 5 10 11 Time (s) This shows a section of the data after zooming in to look at the motion of one back and forth. This is an example of a section you will analyze.Wheel - Position (100 Hz) 0.20 0.15 0.10 0.05 0.00 -0.05 0.10 -0.15 2.7 2 8 2.9 3.0 3.1 3.2 3.3 3.4 3.5 3.6 Time (s) Wheel - Velocity (100 Hz) 0.6 0.4 0.2 -0.0 -0.2 -0.4 -0.6 2.7 2 8 2.9 3.0 3.1 3.2 3.3 3.4 3.5 3.6 Time (s) Wheel - Acceleration (100 Hz) 18 ay (m/s') BadANONAME 2.7 2.8 2.9 3.0 3.1 3.2 3.3 3.4 3.5 3.6 Time (s) Watch the following video to see how to accurately find the area under a curve:Lab Report Your lab report should include pictures of your data (zoomed to one positive position slope and one negative position slope), highlighted in analysis mode over one of these, extraction of data into a neat table, and a discussion of how your data either confirms or disputes these two relations: Vy = % [velocity = slope of x vs. 1] x=xp=v, At [Aposition = area under v vs. t] This level of analysis should be performed once on the positive slope and once on the negative slope.
Step by Step Solution
There are 3 Steps involved in it
Step: 1
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2
Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance