

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
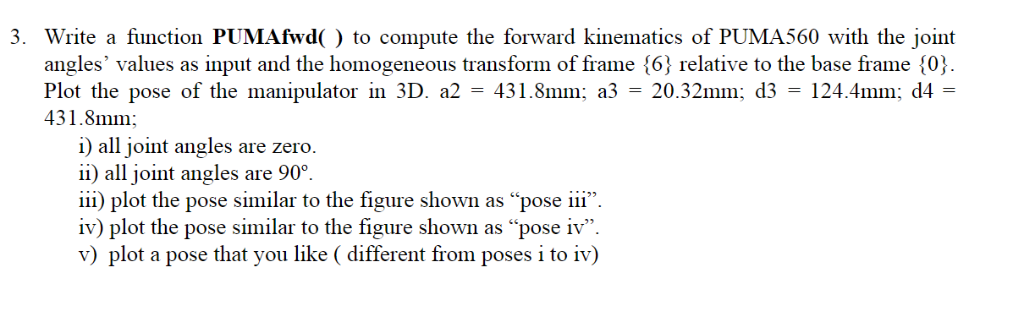
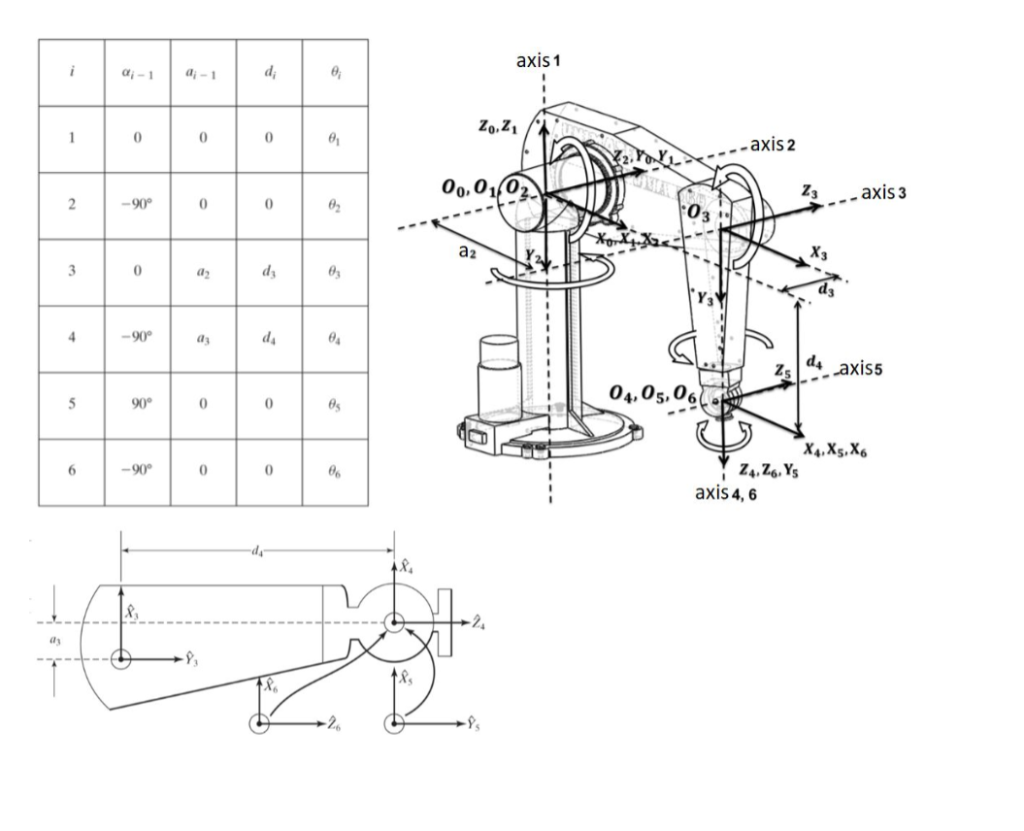
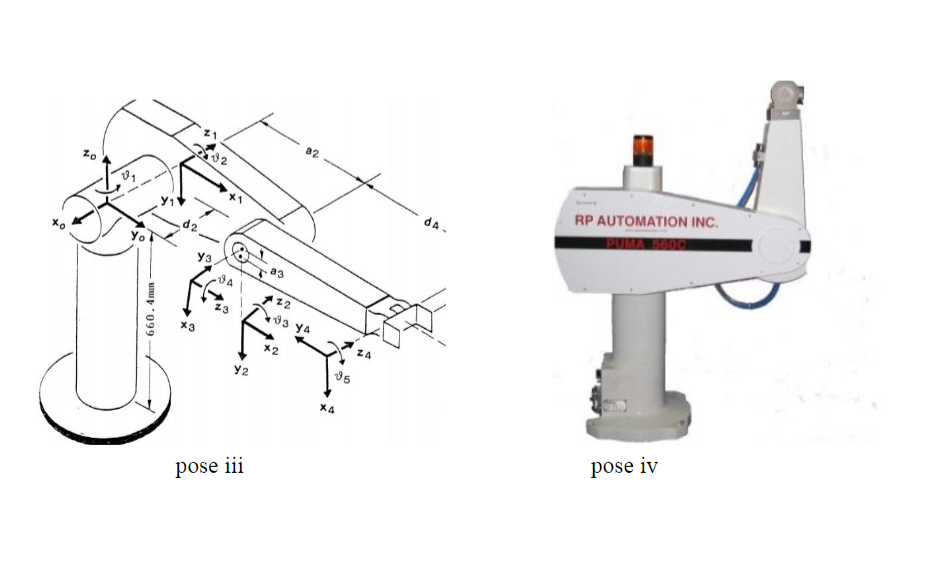
. Write a function PUMAfwd) to compute the forward kinematics of PUMA560 with the joint angles' values as input and the homogeneous transform of frame
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Postgresql 16 Administration Cookbook Solve Real World Database Administration Challenges With 180+ Practical Recipes And Best Practices
Authors: Gianni Ciolli ,Boriss Mejias ,Jimmy Angelakos ,Vibhor Kumar ,Simon Riggs
1st Edition
1835460585, 978-1835460580