Write down the change equation for this system. Indicate what each term represents and include the units for each term. Exercise C. Consider the mass-spring
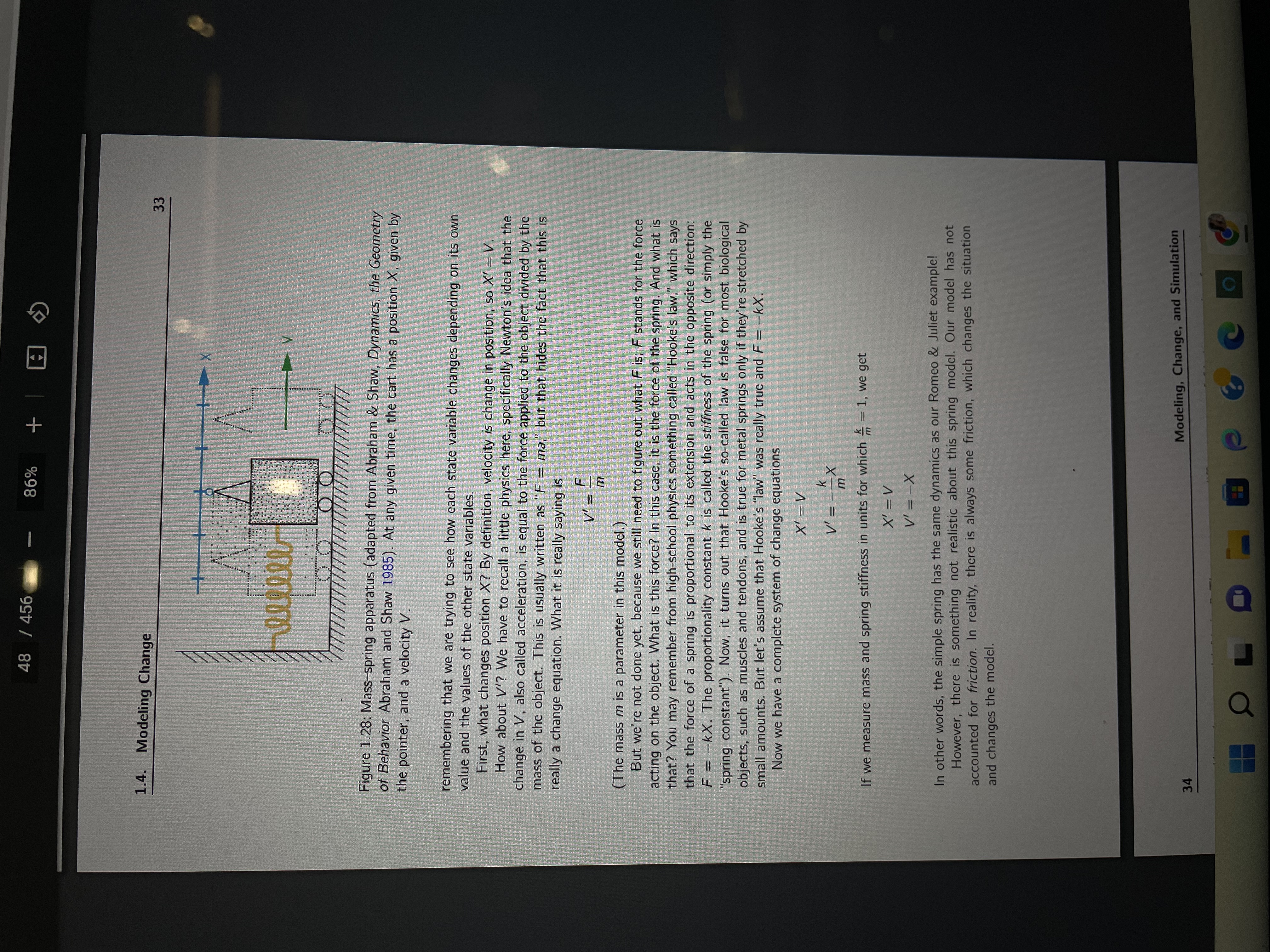
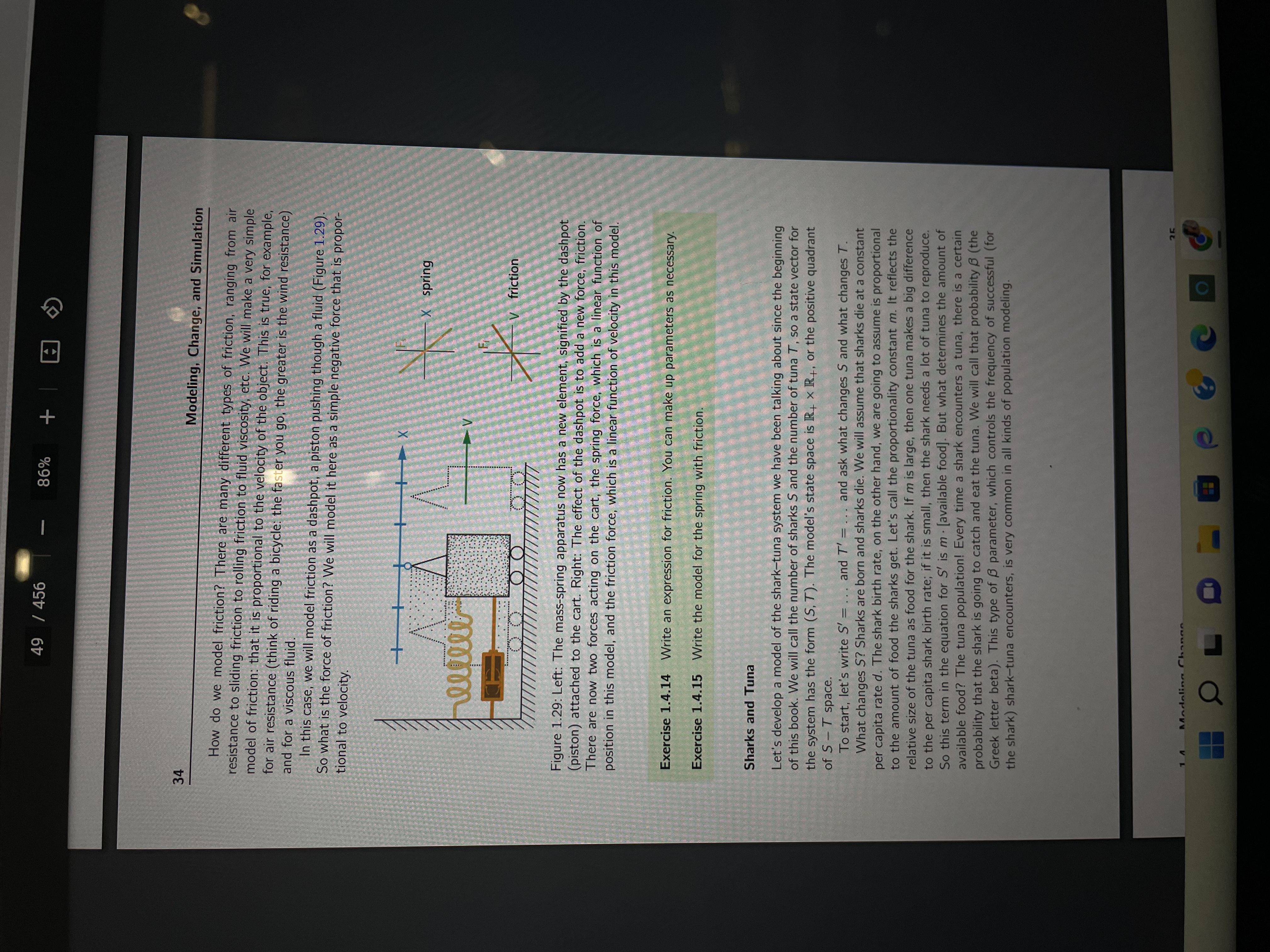
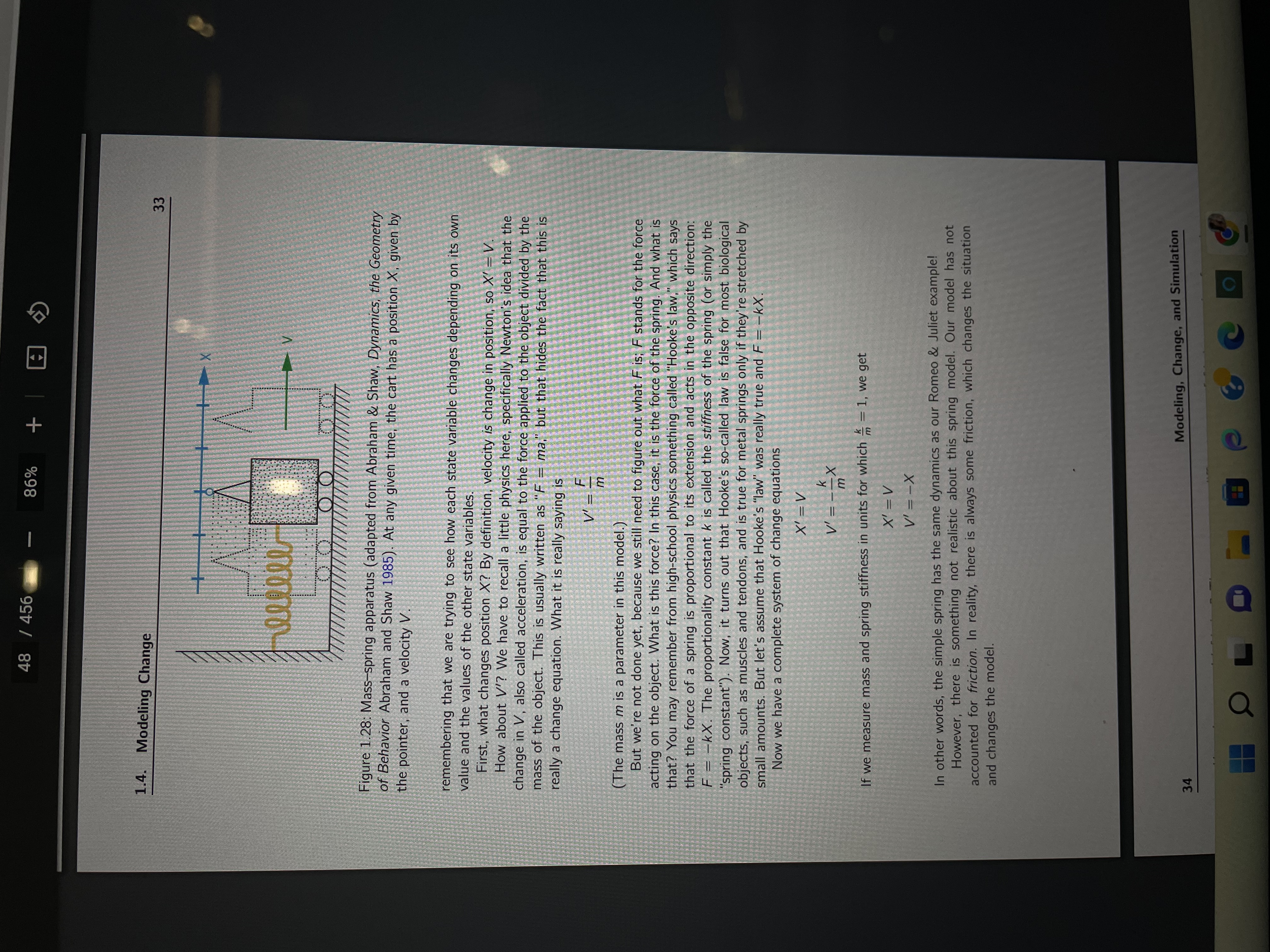
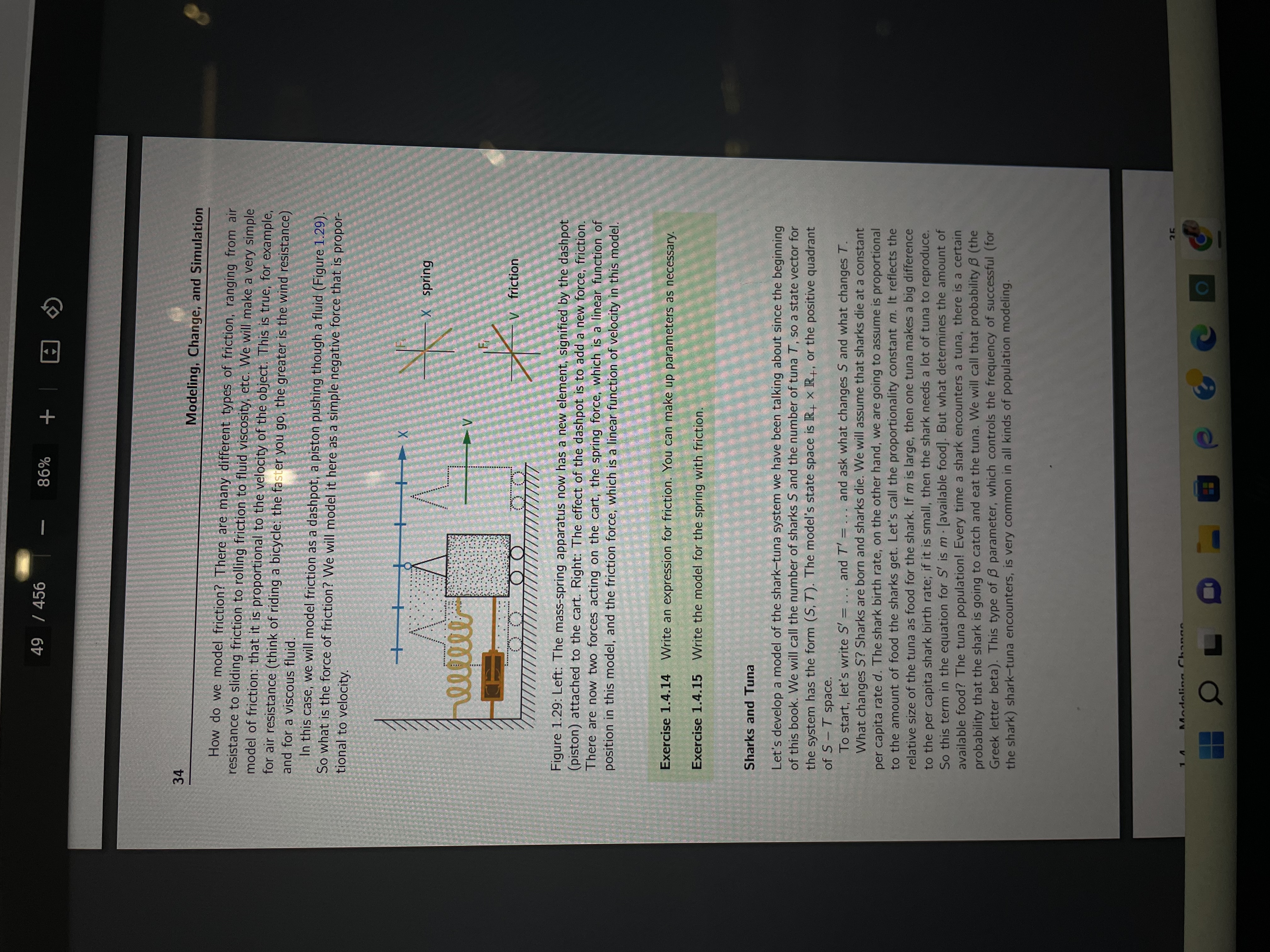
Write down the change equation for this system. Indicate what each term represents and include the units for each term. Exercise C. Consider the mass-spring systeln described on pp. 32-34 in the textbook. We want to determine the model for the massspring system with friction. Suppose that a > 0 is a positive constant. Based on the description in the textbook, which one of the following models describes the massspring system with friction? Explain your reasoning. i) X'=Vand l2": XlV ii) X' = V and V' : x + t\" iii) X' = V and V' iX + X m H lav :x: | iv '3'\" IN- iv) X' = V and V' v) X\" = V and V' ix svz 1'\" 1'\". vi) X\" = V and V' = ix x \"I m 48 / 456 86% + 1.4. Modeling Change 33 Figure 1.28: Mass-spring apparatus (adapted from Abraham & Shaw, Dynamics, the Geometry of Behavior Abraham and Shaw 1985). At any given time, the cart has a position X, given by the pointer, and a velocity V. remembering that we are trying to see how each state variable changes depending on its own value and the values of the other state variables. First, what changes position X? By definition, velocity is change in position, so X' = V. How about V'? We have to recall a little physics here, specifically Newton's idea that the change in V, also called acceleration, is equal to the force applied to the object divided by the mass of the object. This is usually written as "F - ma." but that hides the fact that this is really a change equation. What it is really saying is E (The mass m is a parameter in this model.) But we're not done yet, because we still need to figure out what F is, F stands for the force acting on the object. What is this force? In this case, it is the force of the spring. And what is that? You may remember from high-school physics something called "Hooke's law." which says that the force of a spring is proportional to its extension and acts in the opposite direction: F - -kX. The proportionality constant k is called the stiffness of the spring (or simply the "spring constant"). Now, it turns out that Hooke's so-called law is false for most biological objects, such as muscles and tendons, and is true for metal springs only if they're stretched by small amounts. But let's assume that Hooke's "law" was really true and F = -kX. Now we have a complete system of change equations X' = V K X m If we measure mass and spring stiffness in units for which m = 1, we get X' =V V' = - X In other words, the simple spring has the same dynamics as our Romeo & Juliet example! However, there is something not realistic about this spring model. Our model has not accounted for friction. In reality, there is always some friction, which changes the situation and changes the model. Modeling, Change, and Simulation 34 O32 Modeling, Change, and Simulation Two-Variable Systems Romeo & Juliet A wonderful set of examples, initially developed by Cornell mathematician Steve Strogatz, con- cerns the love dynamics of a couple we will call Romeo and Juliet. We will let R represent Romeo's feelings for Juliet, and J represent Juliet's feelings for Romeo. Positive values repre- sent love and negative values represent hatred. The state space for the Romeo-Juliet system is the 2-dimensional space (R. J). What changes J and what changes R? That obviously depends on the details of their per- sonality types and their relationship.' For example, let's assume that the changes in Juliet's love do not depend on her own feelings, but are purely a reflection of Romeo's love for her. If his love is positive, hers grows, and if he hates her, her love will decrease, possibly even into hate. Let's say the change in Juliet's love is proportional to Romeo's love, Let's assume, for this first model, that it's a linear proportionality, and that the proportionality constant is 1. So we have just said that J' = R. Romeo, on the other hand, has issues. He also does not care about his own feelings and only reacts to Juliet, but in his case, the reaction is negative. If Juliet loves him, his love declines, and if she hates him, his love will increase. So R' = -J. Our complete model is now given by the pair of change equations J' = R R - - Exercise 1.4.13 Suppose that in addition to being turned off by Juliet's love, Romeo is turned off by his own love for her. Specifically, Romeo's love declines at a rate proportional to itself with proportionality constant k. Write a model for the Romeo Juliet system that adds in this assumption. Springs Consider a basic example in mechanics: a simple mass-spring system (Figure 1.28). The mass s a cart that is attached to a spring, and rolls back and forth. What are the states of this system? Obviously, the position X of the mass (the cart) is one state variable, but are there any others? Yes! In physics, and in mechanics in particular, velocity is also a state variable, necessary to describe the state of the system. "The position of the mass is at X = 2" is one state, but "the velocity is +3" is also necessary to predict the system's future behavior. The mass being at X = 2 and heading to the left at 3 meters per second is in a different state from that in which the mass is at X = 2 and heading to the right at 5 meters per second. So in mechanics, state spaces tend to have two types of state variables: positions and velocities. In this case, the state space of the mass-spring system is made up of all pairs (X, V) repre- senting the position of the cart (X) and its velocity (V). Now let's write the change equations X' = f (X, V ) and V' = g (X. V) 7See Strogatz's "Love affairs and differential equations," Mathematics Magazine (Strogatz 1988) or his book (Strogatz 2014) for some great examples. Generalizations to more complex psychologies and more than two people can be found in Sprott (2004) and Gragnani et al. (1997).49 / 456 86% + 34 Modeling, Change, and Simulation How do we model friction? There are many different types of friction, ranging from air resistance to sliding friction to rolling friction to fluid viscosity, etc. We will make a very simple model of friction: that it is proportional to the velocity of the object. This is true, for example, for air resistance (think of riding a bicycle: the faster you go, the greater is the wind resistance) and for a viscous fluid. In this case, we will model friction as a dashpot, a piston pushing though a fluid (Figure 1.29) So what is the force of friction? We will model it here as a simple negative force that is propor- tional to velocity. spring V friction Figure 1.29: Left: The mass-spring apparatus now has a new element, signified by the dashpot (piston) attached to the cart. Right: The effect of the dashpot is to add a new force, friction. There are now two forces acting on the cart, the spring force, which is a linear function of position in this model, and the friction force, which is a linear function of velocity in this model. Exercise 1.4.14 Write an expression for friction. You can make up parameters as necessary. Exercise 1.4.15 Write the model for the spring with friction. Sharks and Tuna Let's develop a model of the shark-tuna system we have been talking about since the beginning of this book. We will call the number of sharks S and the number of tuna T, so a state vector for the system has the form (S, T). The model's state space is R, x R+, or the positive quadrant of S - T space. To start, let's write S' = ... and T' = ... and ask what changes S and what changes T. What changes S? Sharks are born and sharks die. We will assume that sharks die at a constant per capita rate d. The shark birth rate, on the other hand, we are going to assume is proportional to the amount of food the sharks get. Let's call the proportionality constant m. It reflects the relative size of the tuna as food for the shark. If m is large, then one tuna makes a big difference to the per capita shark birth rate; if it is small, then the shark needs a lot of tuna to reproduce. So this term in the equation for S' is m . [available food]. But what determines the amount of available food? The tuna population! Every time a shark encounters a tuna, there is a certain probability that the shark is going to catch and eat the tuna. We will call that probability B (the Greek letter beta). This type of B parameter, which controls the frequency of successful (for the shark) shark-tuna encounters, is very common in all kinds of population modeling. 25 1 1 Madalion Chaman
Step by Step Solution
There are 3 Steps involved in it
Step: 1
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2
Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance