

(a) Show that the following rotational mechanical system is represented by the differential equation (Figure 3.42) [dot{omega}_{1}+left[frac{b_{1}+b_{2}}{J}ight]...
Question:
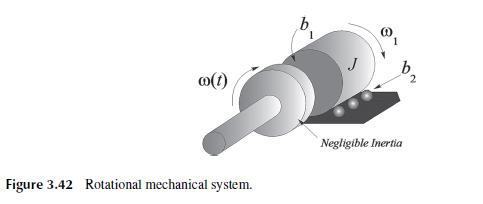
(a) Show that the following rotational mechanical system is represented by the differential equation (Figure 3.42)
\[\dot{\omega}_{1}+\left[\frac{b_{1}+b_{2}}{J}ight] \omega_{1}=\frac{b_{1}}{J} \omega(t)\]
(b) Given the following information: \(\omega(t)=10, b_{1}=b_{2}=1, \omega_{1}(0)=0\) and \(J=2\), find \(\tau\), the time constant and \(\omega_{1_{s s}}\), the steady-state speed.
(c) Deduce the system response (solution to the differential equation).
(d) Solve the same differential equation in (a) with the data in (b) by using Laplace transforms.
(e) Plot the system response and confirm your plot using the IVT and FVT.
Step by Step Answer:

This question has not been answered yet.
You can Ask your question!
Related Book For 

Design And Analysis Of Control Systems Driving The Fourth Industrial Revolution
ISBN: 9781032718804
2nd Edition
Authors: Arthur G O Mutambara
Question Posted:
