

Consider a general closed-loop unity feedback control system shown in Figure 5.34, where (K) is the controller
Question:
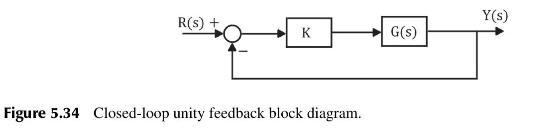
Consider a general closed-loop unity feedback control system shown in Figure 5.34, where \(K\) is the controller gain and \(G(s)\) is the plant Transfer Function model.
(a) For the two systems with the following plant Transfer Function models
\[\begin{aligned}G(s) & =\frac{3 s-4}{s^{2}-2 s+2} \\G(s) & =-\frac{3 s-4}{s^{2}-2 s+2} .\end{aligned}\]
(i) Obtain the root loci for the two systems.
(ii) Is there any value of controller gain \(K\) that will stabilise either of these plants?
(b) Sketch the root loci for the dynamic systems with the following plant Transfer Function models:
(i) \(G(s)=\frac{(s+2)(s+6)}{s^{2}+8 s+25}\)
(ii) \(G(s)=\frac{s^{2}+4}{s^{2}+1}\)
(iii) \(G(s)=\frac{s^{2}+1}{s^{2}}\)
(iv) \(G(s)=\frac{1}{(s+1)^{3}(s+4)}\).
Step by Step Answer:

This question has not been answered yet.
You can Ask your question!


Design And Analysis Of Control Systems Driving The Fourth Industrial Revolution
ISBN: 9781032718804
2nd Edition
Authors: Arthur G O Mutambara
