Rotations have various applications. We show in this project how they can be handled by matrices. (a)
Question:
Rotations have various applications. We show in this project how they can be handled by matrices.
(a) Show that the linear transformation y = Ax with
 is a counterclockwise rotation of the Cartesian x1x2-coordinate system in the plane about the origin, where θ is the angle of rotation.
is a counterclockwise rotation of the Cartesian x1x2-coordinate system in the plane about the origin, where θ is the angle of rotation.
(b) Show that in (a)
Is this plausible? Explain this in words.
(c) By geometry we should have
Derive from this the addition formulas (6) in App. A3.1.
(d) To visualize a three dimensional object with plane faces (e.g., a cube), we may store the position vectors of the vertices with respect to a suitable x1x2x3-coordinate system (and a list of the connecting edges) and then obtain a two dimensional image on a video screen by projecting the object onto a coordinate plane, for instance, onto the x1x2-plane by setting x3 = 0. To change the appearance of the image, we can impose a linear transformation on the position vectors stored. Show that a diagonal matrix D with main diagonal entries 3, 1, 1/2 gives from an x = [xj] the new position vector y = Dx, where y1 = 3x1 (stretch in the x1-direction by a factor 3), y2 = x2 (unchanged), y3 = 1/2x3 (contraction in the x3-direction). What effect would a scalar matrix have?
(e) Explain y = Ax geometrically when A is one of the three matrices
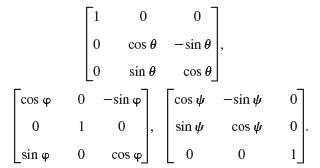
What effect would these transformations have in situations such as that described in (c)?
Step by Step Answer:
b Use induction on n True if n 1 Take the formula in the problem as the induction hypothes...View the full answer