

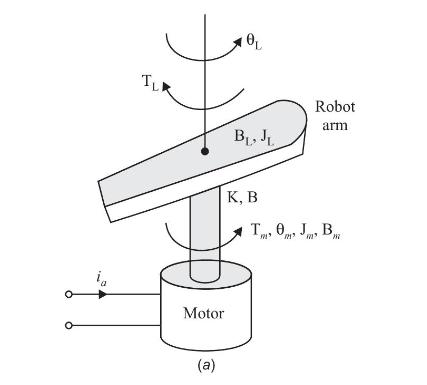
The linear model of a robot arm system being driven by a DC motor, is shown in
Question:
The linear model of a robot arm system being driven by a DC motor, is shown in Fig. P 9.9 (a). The system variables and parameters are given below:
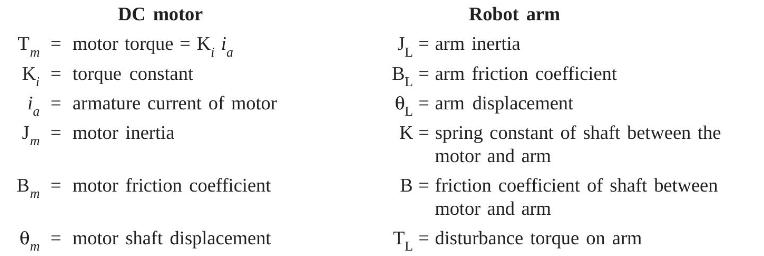
(a) Write equations describing dynamics of system with \(i_{a}(t)\) and \(\mathrm{T}_{\mathrm{L}}(t)\) as inputs and \(\theta_{m}(t)\) and \(\theta_{\mathrm{L}}(t)\) as outputs.
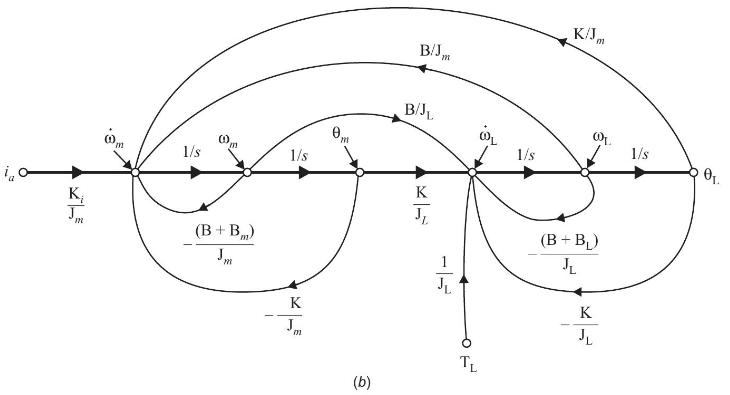
(b) Sketch signal flow graph choosing \(\mathrm{I}_{a}(s), \mathrm{T}_{\mathrm{L}}(s), \theta_{m}(s)\) and \(\theta_{\mathrm{L}}(s)\) as node variables.
Fantastic news! We've Found the answer you've been seeking!
Step by Step Answer:
To write equations describing the dynamics of the system with iat and mathrmTmathrmLt as inputs and thetamt and thetamathrmLt as outputs we can start ...View the full answer

Answered By
Ali Khawaja
my expertise are as follows: financial accounting : - journal entries - financial statements including balance sheet, profit & loss account, cash flow statement & statement of changes in equity -consolidated statement of financial position. -ratio analysis -depreciation methods -accounting concepts -understanding and application of all international financial reporting standards (ifrs) -international accounting standards (ias) -etc business analysis : -business strategy -strategic choices -business processes -e-business -e-marketing -project management -finance -hrm financial management : -project appraisal -capital budgeting -net present value (npv) -internal rate of return (irr) -net present value(npv) -payback period -strategic position -strategic choices -information technology -project management -finance -human resource management auditing: -internal audit -external audit -substantive procedures -analytic procedures -designing and assessment of internal controls -developing the flow charts & data flow diagrams -audit reports -engagement letter -materiality economics: -micro -macro -game theory -econometric -mathematical application in economics -empirical macroeconomics -international trade -international political economy -monetary theory and policy -public economics ,business law, and all regarding commerce
1+ Reviews
10+ Question Solved
Related Book For 
Question Posted:
