

Question: A drive system with an elastically coupled load was presented in Problem 71, Chapter 4. The mechanical part of this drive (Thomsen, 2011) was reduced
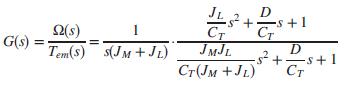
A drive system with an elastically coupled load was presented in Problem 71, Chapter 4. The mechanical part of this drive (Thomsen, 2011) was reduced to a two-inertia model. Using slightly different parameters, the following transfer function results:
![]()
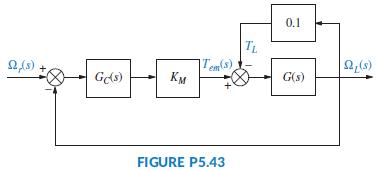
Here, T(s) = Tem(s) - TL(s), where Tem (s) = the electromagnetic torque developed by the motor, TL(s) = the load torque, and ΩL(s) = the load speed.
The drive is shown in Figure P5.43 as the controlled unit in a feedback control loop, where Ωr(s) = the desired (reference) speed. The controller transfer function is GC(s) = Kp + KI/s = 4 + 0.5/s and provides an output voltage = 0 – 5.0 volts. The motor and its power amplifier have a gain, KM = 10 N-m/volt.
a. Find the minor-loop transfer function, D(s) = ΩL(s)/Tem(s) analytically or using MATLAB.
b. Given that at t = 0, the load speed ωL(t) = 0 rad/sec and a step reference input ωr(t) = 260 u(t), rad/sec, is applied, use MATLAB (or any other program) to find and plot ωL(t). Mark on the graph all of the important characteristics, such as percent overshoot, peak time, rise time, settling time, and final steady-state value.
Data From Problem 71, Chapter 4:
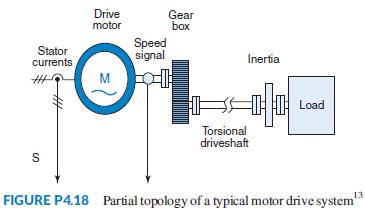
A drive system with elastically coupled load (Figure P4.18) has a motor that is connected to the load via a gearbox and a long shaft.
The system parameters are: JM = drive-side inertia= 0.0338 kg-m2, JL = load-side inertia = 0.1287 kg-m2, K = CT = torsional spring constant = 1700 N-m/rad, and D = damping coefficient = 0.15 N-m-s/rad.
This system can be reduced to a simple two inertia model that may be represented by the following transfer function, relating motor shaft speed output, Ω(s), to electromagnetic torque input (Thomsen, 2011):
Assume the system is at standstill at t = 0, when the electromagnetic torque, Tem, developed by the motor changes from zero to 50 N-m. Find and plot on one graph, using MATLAB or any other program, the motor shaft speed, ω(t), rad/sec, for the following two cases:
Q(s) 25(s + 1.2s + 12500) T(s) G(s) : s(s? +5.6s + 62000)
Step by Step Solution
3.48 Rating (165 Votes )
There are 3 Steps involved in it
a Finding the minorloop transfer function Ds LsTems To find the minorloop transfer function we nee... View full answer

Get step-by-step solutions from verified subject matter experts