

Question: Figure P8.15 shows a simplified drawing of a feedback system that includes the drive system presented in Problem 67, Chapter 5 (Thomsen, 2011). Referring to
Figure P8.15 shows a simplified drawing of a feedback system that includes the drive system
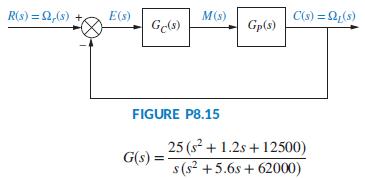
presented in Problem 67, Chapter 5 (Thomsen, 2011). Referring to Figures P5.43 and P8.15, Gp(s) in Figure P8.15 is given by:
![]()
Given that the controller is proportional, that is, GC(s)= KP, use MATLAB and a procedure similar to that developed in Problem 40 in this chapter to plot the root locus4 and obtain the output response, c(t) = ωL(t), when a step input, r(t)= ωr (t) = 260 u(t) rad/ sec, is applied at t = 0. Mark on the time response graph, c(t), all relevant characteristics, such as the percent overshoot (which should not exceed 16%), peak time, rise time, settling time, and final steady-state value.
Data From Problem 67, Chapter 5:
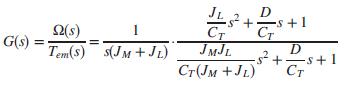
A drive system with an elastically coupled load was presented in Problem 71, Chapter 4. The mechanical part of this drive (Thomsen, 2011) was reduced to a two-inertia model. Using slightly different parameters, the following transfer function results:
![]()
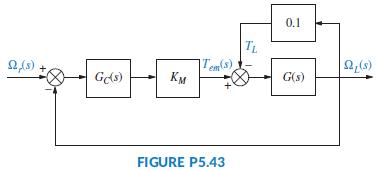
Here, T(s) = Tem(s) - TL(s), where Tem (s) = the electromagnetic torque developed by the motor, TL(s) = the load torque, and ΩL(s) = the load speed. The drive is shown in Figure P5.43 as the controlled unit in a feedback control loop, where Ωr(s) = the desired (reference) speed. The controller transfer function is GC(s) = Kp + KI/s = 4 + 0.5/s and provides an output voltage = 0 – 5.0 volts. The motor and its power amplifier have a gain, KM = 10 N-m/volt.
Data From Problem 71, Chapter 4:
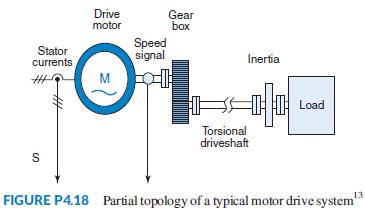
A drive system with elastically coupled load (Figure P4.18) has a motor that is connected to the load via a gearbox and a long shaft. The system parameters are: JM = drive-side inertia= 0.0338 kg-m2, JL = load-side inertia = 0.1287 kg-m2, K = CT = torsional spring constant = 1700 N-m/rad, and D = damping coefficient = 0.15 N-m-s/rad. This system can be reduced to a simple two inertia model that may be represented by the following transfer function, relating motor shaft speed output, Ω(s), to electromagnetic torque input (Thomsen, 2011):
Assume the system is at standstill at t = 0, when the electromagnetic torque, Tem, developed by the motor changes from zero to 50 N-m. Find and plot on one graph, using MATLAB or any other program, the motor shaft speed, ω(t), rad/sec, for the following two cases:
R(s) = 2,(s) E(s) M(s) C(s) = 2,(s) Gels) Gp(s) FIGURE P8.15 25 (s + 1.2s + 12500) s(s? +5.6s + 62000) G(s)
Step by Step Solution
3.42 Rating (149 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts