

An X-4 quadrotor flyer is designed as a small-sized unmanned autonomous vehicle (UAV) that flies mainly indoor
Question:
An X-4 quadrotor flyer is designed as a small-sized unmanned autonomous vehicle (UAV) that flies mainly indoor sand can help in search and recognizance missions. To minimize mechanical problems and for simplicity, this aircraft uses fixed pitch rotors with specially designed blades. Therefore, for thrust it is necessary to add a fifth propeller. A simplified design of the thrust control design can be modeled as in Figure P9.1 with G(s) = Gc(s)P(s) where
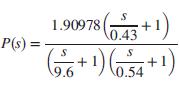
represents the dynamics of the thruster rotor gain, the motor, and the battery dynamics. Initially, the system is designed using a proportional compensator given by Gc(s) = 3.
a. Calculate the resulting steady-state error for a unit step input.
b. Design a lag compensator to yield half the steady state error of the proportional compensator, without appreciably affecting the system’s transient response.
c. Use MATLAB to simulate the original design and the lag compensated design. Verify your results.
Step by Step Answer:



