

Question: Look-ahead information can be used to automatically steer a bicycle in a closed-loop configuration. A line is drawn in the middle of the lane to
Look-ahead information can be used to automatically steer a bicycle in a closed-loop configuration. A line is drawn in the middle of the lane to be followed, and an arbitrary point is chosen in the vehicle’s longitudinal axis. A look-ahead offset is calculated by measuring the distance between the look-ahead point and the reference line and is used by the system to correct the vehicle’s trajectory. A linearized model of a particular bicycle traveling on a straight-line path at a fixed longitudinal speed is
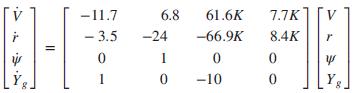
In this model, V= bicycle’s lateral velocity, r = bicycle’s yaw velocity, ψ = bicycle’s yaw acceleration, and Yg = bicycle’s center of gravity coordinate on the y-axis. K is a controller parameter to be chosen by the designer (Özgüner, 1995). Use the Routh-Hurwitz citerion to find the range of K for which the system is closed-loop stable.
-11.7 6.8 61.6K 7.7K - 3.5 -24 -66.9K 8.4K r I 1 -10 Y.
Step by Step Solution
3.38 Rating (167 Votes )
There are 3 Steps involved in it
Here is the solution Find the characteristic equation ... View full answer

Get step-by-step solutions from verified subject matter experts