

Question: Modern robotic manipulators that act directly upon their target environments must be controlled so that impact forces as well as steady-state forces do not damage
Modern robotic manipulators that act directly upon their target environments must be controlled so that impact forces as well as steady-state forces do not damage the targets. At the same time, the manipulator must provide sufficient force to perform the task. In order to develop a control system to regulate these forces, the robotic manipulator and target environment must be modeled. Assuming the model shown in Figure P3.14, represent in state space the manipulator and its environment under the following conditions
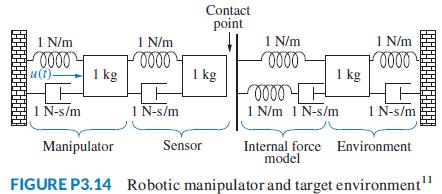
a. The manipulator is not in contact with its target environment.
b. The manipulator is in constant contact with its target environment.
Contact point 1 N/m 1 N/m 1 N/m 1 N/m u(t) 1 kg 1 kg 1 kg 1 N-s/m 1 N-s/m 1 N/m 1 N-s/m 1 N-s/m Manipulator Sensor Internal force Environment model FIGURE P3.14 Robotic manipulator and target environment"
Step by Step Solution
3.28 Rating (172 Votes )
There are 3 Steps involved in it
a When the manipulator is not in contact with its target environment the sta... View full answer

Get step-by-step solutions from verified subject matter experts