

Question: Image-based homing for robots can be implemented by generating heading command inputs to a steering system based on the following guidance algorithm. Suppose the robot
Image-based homing for robots can be implemented by generating heading command inputs to a steering system based on the following guidance algorithm. Suppose the robot shown in Figure P3.13(a) is to go from point R to a target, point T, as shown in Figure P3.13(b). If Rx, Ry, and Rz are vectors from the robot to each landmark, X, Y, Z, respectively, and Tx, Ty, and Tz are vectors from the target to each landmark, respectively, then heading commands would drive the robot to minimize Rx - Tx; Ry - Ty; and Rz - Tz simultaneously, since the differences will be zero when the robot arrives at the target (Hong, 1992). If Figure P3.13(c) represents the control system that steers the robot, represent each block—the controller, wheels, and vehicle—in state space. An animation PowerPoint presentation (PPT) demonstrating this system is available for instructors atwww.wiley.com/college/nise.
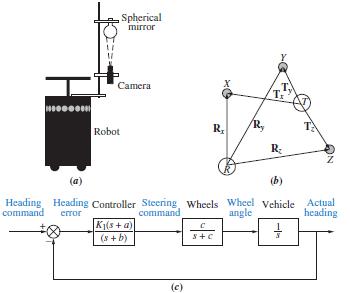
FIGURE P3.13
a. Robot with television imaging system;10
b. vector diagram showing concept behind image-based homing;10
c. heading control system
Spherical mirror Camera T Robot R, R: (a) (b) Heading Heading Controller Steering, Wheels Wheel Vehicle Actual command ommand angle heading error K1(s + a) (s + b) 1. (c) HI
Step by Step Solution
3.47 Rating (163 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts