

The differential equation model for a certain position control system for a metal cutting tool is where
Question:
The differential equation model for a certain position control system for a metal cutting tool is
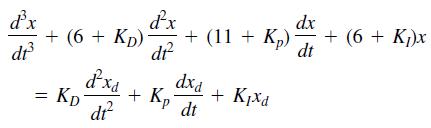
where the actual tool position is x; the desired position is xd (t); and Kp, KI, and KD are constants called the control gains. Use the Laplace transform method to find the unit-step response [that is, xd(t) is a unit-step function].
Use zero initial conditions. Compare the response for three cases.
a. Kp = 30, KI = KD = 0
b. Kp = 27, KI = 17.18, KD = 0
c. Kp = 36, KI = 38.1, KD = 8.52
Fantastic news! We've Found the answer you've been seeking!
Step by Step Answer:
ANSWER To find the unitstep response of the given system using the Laplace transform method we first ...View the full answer

Answered By
Churchil Mino
I have been a tutor for 2 years and have experience working with students of all ages and abilities. I am comfortable working with students one-on-one or in small groups, and am able to adapt my teaching style to meet the needs of each individual. I am patient and supportive, and my goal is to help my students succeed.
I have a strong background in math and science, and have tutored students in these subjects at all levels, from elementary school to college. I have also helped students prepare for standardized tests such as the SAT and ACT. In addition to academic tutoring, I have also worked as a swim coach and a camp counselor, and have experience working with children with special needs.
0 Reviews
10+ Question Solved
Related Book For 
Question Posted:
