

Question: A rotor, having three eccentric masses in different planes, is shown in Fig. 9.43. The axial, radial, and angular locations of mass (m_{i}) are given
A rotor, having three eccentric masses in different planes, is shown in Fig. 9.43. The axial, radial, and angular locations of mass \(m_{i}\) are given by \(l_{i}, r_{i}\), and \(\theta_{i}\), respectively, for \(i=1,2,3\). If the rotor is to be dynamically balanced by locating two masses \(m_{b 1}\) and \(m_{b 2}\) at radii \(r_{b 1}\) and \(r_{b 2}\) at the angular locations \(\theta_{b 1}\) and \(\theta_{b 2}\), as shown in Fig. 9.42, derive expressions for \(m_{b 1} r_{b 1}, m_{b 2} r_{b 2}, \theta_{b 1}\), and \(\theta_{b 2}\).
Figure 9.43:-
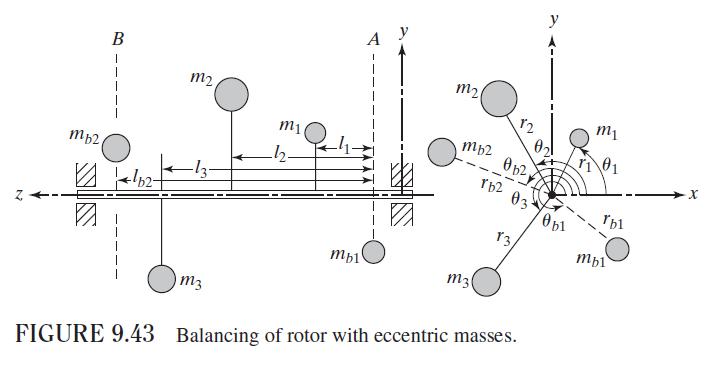
Z. 2 A B m2 m2 12 mb2 02 m 01 mi X -12- ? 03 162- 13. mbl mb2 mbl m3 m3 FIGURE 9.43 Balancing of rotor with eccentric masses.
Step by Step Solution
3.46 Rating (162 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts