

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
1. A third-order system is described in observable canonical form: [x1 (k+1)] -a2 1 0] [1(k) x2 (k+1) x3 (k+ = -a1 0 1
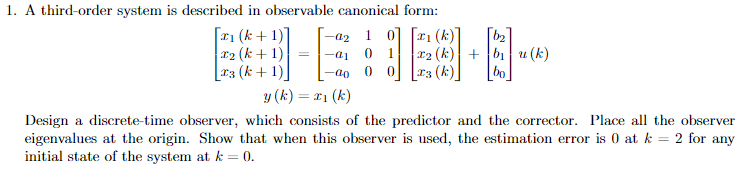
1. A third-order system is described in observable canonical form: [x1 (k+1)] -a2 1 0] [1(k) x2 (k+1) x3 (k+ = -a1 0 1 -ao 0 0 (k) bu(k) 23(k) y (k) = x1 (k) Design a discrete-time observer, which consists of the predictor and the corrector. Place all the observer eigenvalues at the origin. Show that when this observer is used, the estimation error is 0 at k = 2 for any initial state of the system at k = 0.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Modern Control Systems
Authors: Richard C. Dorf, Robert H. Bishop
12th edition
136024580, 978-0136024583