

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
1. Figure (a) shows the Staubli 6R robot, with its zero configuration shown in Figure (b). Draw appropriate link reference frames, and derive the
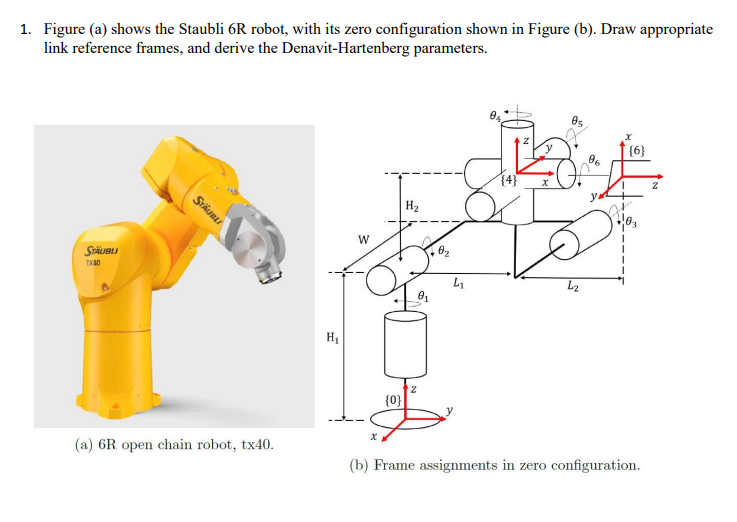
1. Figure (a) shows the Staubli 6R robot, with its zero configuration shown in Figure (b). Draw appropriate link reference frames, and derive the Denavit-Hartenberg parameters. STUBLI TX40 STUBLI (a) 6R open chain robot, tx40. H W {0} H 0 Z L X 8s {6} (b) Frame assignments in zero configuration. Z
Step by Step Solution
There are 3 Steps involved in it
Step: 1
The image you have provided shows a Staubli 6R robot and a diagram depicting its zero configuration with the reference frames assigned to each joint a...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Elements Of Chemical Reaction Engineering
Authors: H. Fogler
6th Edition
013548622X, 978-0135486221