

Answered step by step
Verified Expert Solution
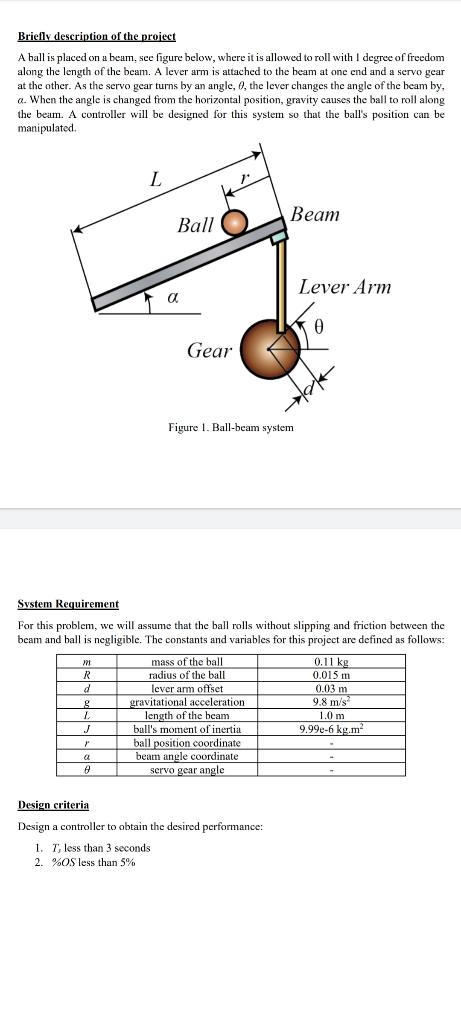
Question
1 Approved Answer
1. Methodology - Screen Shot your model and steps, also describe the steps 2. Results & Discussion - Compare the performance of the controllers 3.
1. Methodology - Screen Shot your model and steps, also describe the steps
2. Results & Discussion - Compare the performance of the controllers
3. Please answer using matlab
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database Systems Design Implementation And Management
Authors: Peter Rob, Carlos Coronel
6th International Edition
061921323X, 978-0619213237