

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
2 . 1 Autonomous Landing of Rocket Stage The autonomous landing of reusable rocket stages became a trending topic around the world in the last
Autonomous Landing of Rocket Stage
The autonomous landing of reusable rocket stages became a trending topic around the world in
the last decade after the successful flight missions of corporations like SpaceX, Blue Origin etc.
and started the new era of lowcost and commercial space missions worldwide.
Figure : Reusable rocket stage and landing site.
In this simplified model, the equations of motion related to stage approaching to a landing
site is given. The rocket stage is assumed to have negligible aerodynamic effects and controlled
by thrust vectoring. Then, the equations become
gsin
gcos
Autonomous Landing of Rocket Stage
The autonomous landing of reusable rocket stages became a trending topic around the world in
the last decade after the successful flight missions of corporations like SpaceX, Blue Origin etc.
and started the new era of lowcost and commercial space missions worldwide.
In this simplified model, the equations of motion related to stage approaching to a landing
site is given. The rocket stage is assumed to have negligible aerodynamic effects and controlled
by thrust vectoring. Then, the equations become
uqw T cos sigma m g sin theta
w qu T sin sigma m g cos theta
theta q
qXcg T sin sigma Iyy
mT gIsp
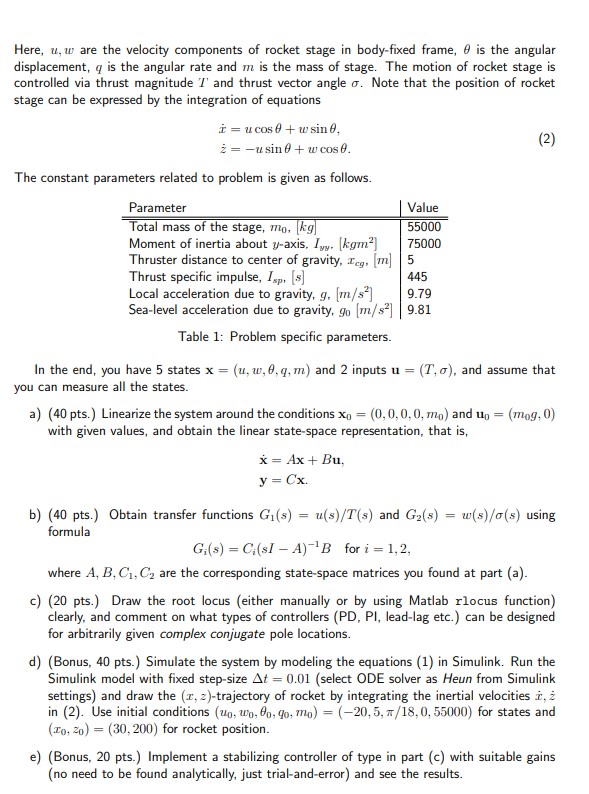
Here, are the velocity components of rocket stage in bodyfixed frame, is the angular
displacement, is the angular rate and is the mass of stage. The motion of rocket stage is
controlled via thrust magnitude and thrust vector angle Note that the position of rocket
stage can be expressed by the integration of equations
ucoswsin
usinwcos
The constant parameters related to problem is given as follows.
Table : Problem specific parameters.
In the end, you have states and inputs and assume that
you can measure all the states.
a pts Linearize the system around the conditions and
with given values, and obtain the linear statespace representation, that is
b pts Obtain transfer functions and using
formula
for
where are the corresponding statespace matrices you found at part a
c pts Draw the root locus either manually or by using Matlab rlocus function
clearly, and comment on what types of controllers PD PI leadlag etc. can be designed
for arbitrarily given complex conjugate pole locations.
dBonus pts Simulate the system by modeling the equations in Simulink. Run the
Simulink model with fixed stepsize select ODE solver as Heun from Simulink
settings and draw the trajectory of rocket by integrating the inertial velocities
in Use initial conditions for states and
for rocket position.
eBonus pts Implement a stabilizing controller of type in part c with suitable gains
no need to be found analytically, just trialanderror and see the results.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Learning PostgreSQL
Authors: Salahaldin Juba, Achim Vannahme, Andrey Volkov
1st Edition
178398919X, 9781783989195