

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
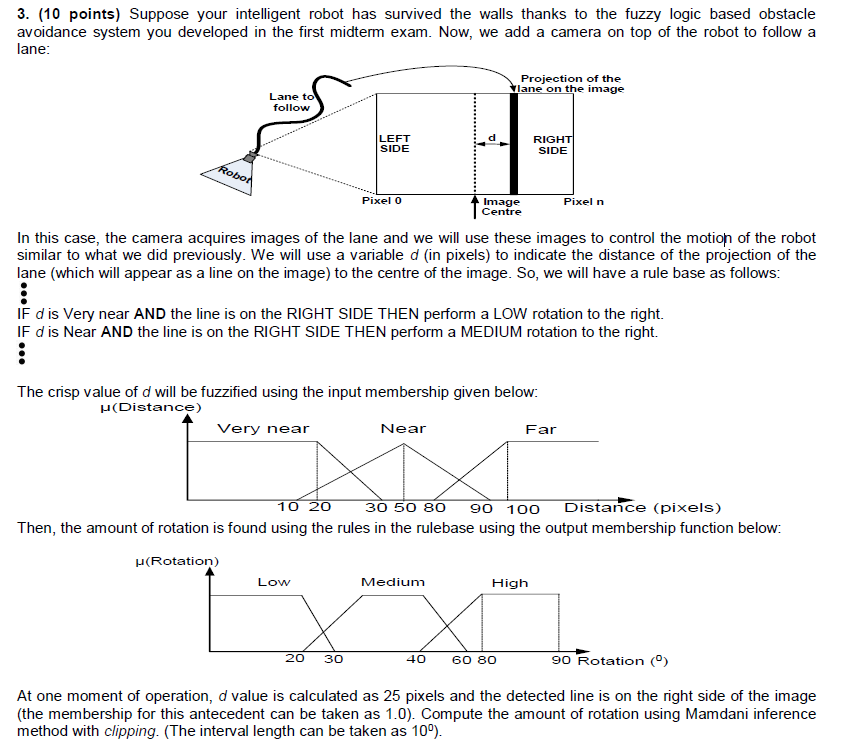
3. (10 points) Suppose your intelligent robot has survived the walls thanks to the fuzzy logic based obstacle avoidance system you developed in the first
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database Administrator Limited Edition
Authors: Martif Way
1st Edition
B0CGG89N8Z