

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
3. Obtain the forward kinematic equations of the robot (A6) in the matrix form using the link and joint parameters that you have already

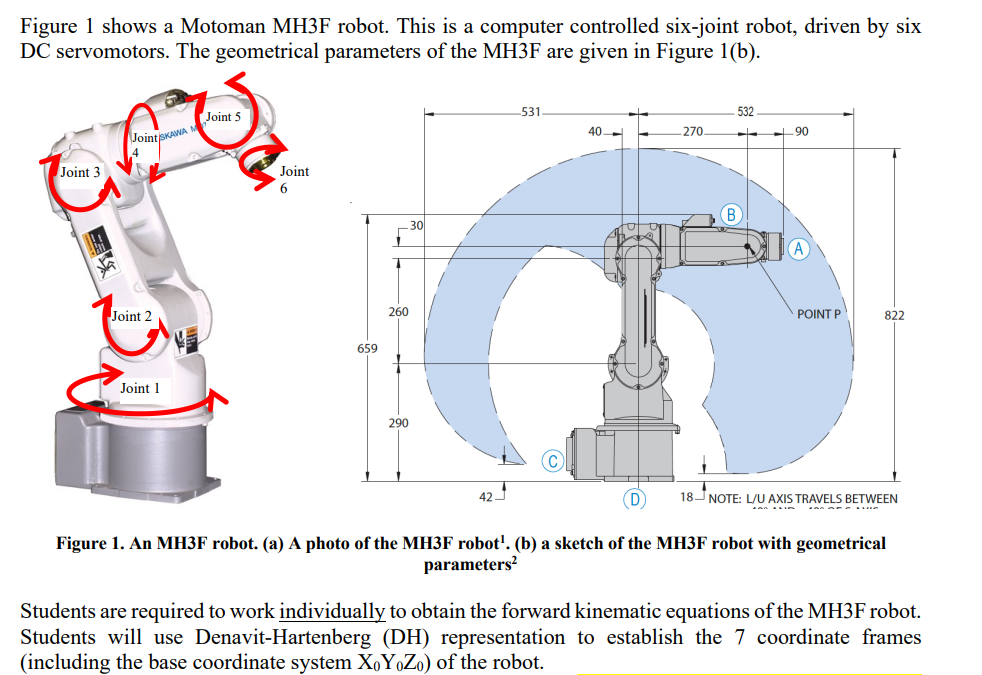
3. Obtain the forward kinematic equations of the robot (A6) in the matrix form using the link and joint parameters that you have already identified (no need to expand the multiplication) (8 marks) Figure 1 shows a Motoman MH3F robot. This is a computer controlled six-joint robot, driven by six DC servomotors. The geometrical parameters of the MH3F are given in Figure 1(b). Joint 5 Joint SKAWA Joint 3 Joint 2 Joint 1 Joint 6 659 260 290 42 -531. 532 40. 270 - 90 POINT P 822 D 18 NOTE: L/U AXIS TRAVELS BETWEEN Figure 1. An MH3F robot. (a) A photo of the MH3F robot. (b) a sketch of the MH3F robot with geometrical parameters Students are required to work individually to obtain the forward kinematic equations of the MH3F robot. Students will use Denavit-Hartenberg (DH) representation to establish the 7 coordinate frames (including the base coordinate system XoYoZo) of the robot.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Intermediate Accounting
Authors: James D. Stice, Earl K. Stice, Fred Skousen
17th Edition
032459237X, 978-0324592375