

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
3. The Two-Link-Planar Robot shown in the figure has two joints, the first is prismatic (motion along the Zo axis (with the displacement d
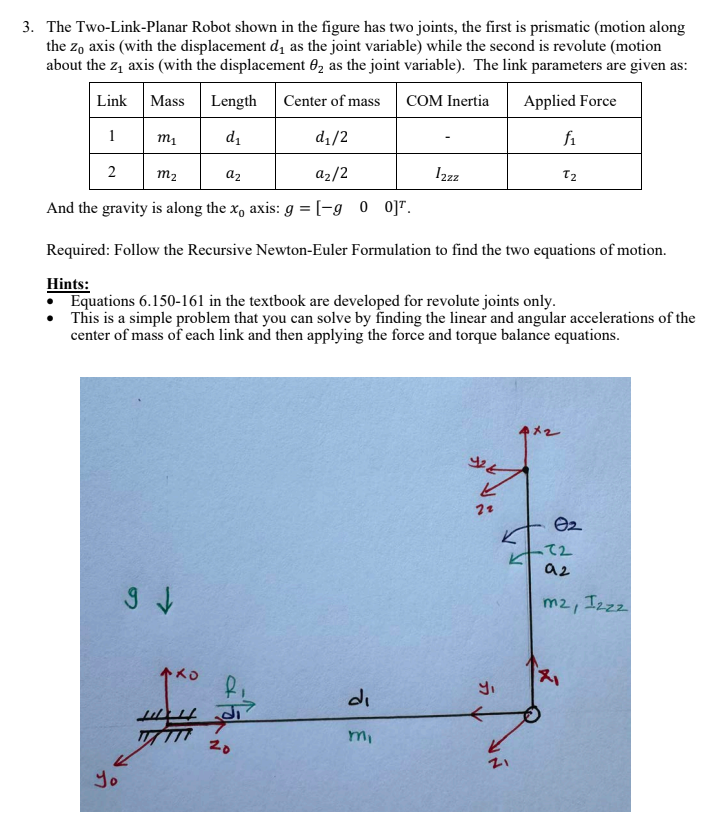
3. The Two-Link-Planar Robot shown in the figure has two joints, the first is prismatic (motion along the Zo axis (with the displacement d as the joint variable) while the second is revolute (motion about the Z axis (with the displacement 02 as the joint variable). The link parameters are given as: Link Mass Length Center of mass COM Inertia 1 m d d/2 2 m2 a2 a2/2 Applied Force fi Izzz And the gravity is along the x axis: g = [-90_0]T. Required: Follow the Recursive Newton-Euler Formulation to find the two equations of motion. Hints: Equations 6.150-161 in the textbook are developed for revolute joints only. This is a simple problem that you can solve by finding the linear and angular accelerations of the center of mass of each link and then applying the force and torque balance equations. 6 di m 20 Yo 1x2 22 K 72 92 F m2, Izzz
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Income Tax Fundamentals 2013
Authors: Gerald E. Whittenburg, Martha Altus Buller, Steven L Gill
31st Edition
1111972516, 978-1285586618, 1285586611, 978-1285613109, 978-1111972516