

Question
= [350 200 150] fix code #include #include #include using namespace cv; using namespace std; int main(int argc, char* argv[]){ //Point3d vector objectPoints; objectPoints.push_back(Point3d(350, 200,
= [350 200 150]
fix code
#include
using namespace cv; using namespace std;
int main(int argc, char* argv[]){ //Point3d vector
float f = 500; float sx = 1; float sy = 1; float ox = 320; float oy = 240;
//projection matrix Mat K(3, 3, DataType
K.at
K.at
//translation vector vector
Mat R = Mat::eye(3, 3, CV_64F);
//distortion Mat distCoeffs(3, 1, DataType
//rotation matrix cvMat rvecR(2, 1, DataType
vector
try{ projectPoints(objectPoints, rvecR, T, K, distCoeffs, projectedPoints); }catch (Exception& e){ const char* err_msg = e.what(); cout
code error: Exception thrown at 0x00007FF80D20A388 in OpenCVExample.exe: Microsoft C++ exception: cv::Exception at memory location 0x000000634A31CC80.
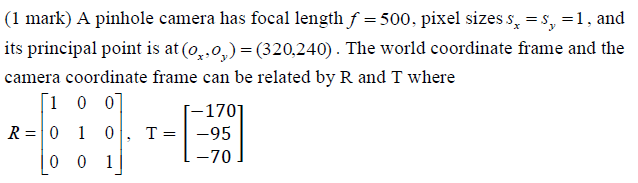
(1 mark) A pinhole camera has focal length f-500. pixel sizes& = 5,-1 . and its principal point is at (2-0) (320.240) . The world coordinate frame and the camera coordinate frame can be related by R and T where -170] 1300 -70 (1 mark) A pinhole camera has focal length f-500. pixel sizes& = 5,-1 . and its principal point is at (2-0) (320.240) . The world coordinate frame and the camera coordinate frame can be related by R and T where -170] 1300 -70Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database Fundamentals Study Guide
Authors: Dr. Sergio Pisano
1st Edition
B09K1WW84J, 979-8985115307