

Question: 6. In Example 8.3 of your textbook, design the speed-loop controller, without the inner current loop, as shown in Figure 3, for the same crossover
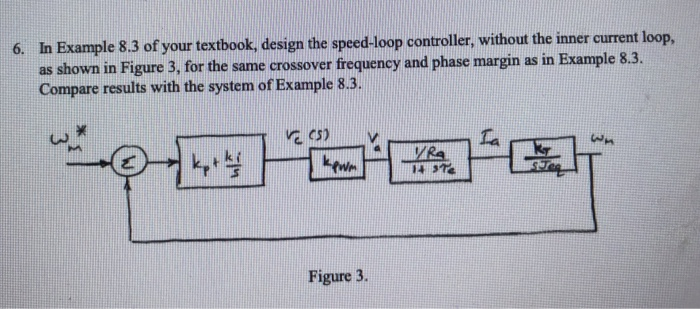
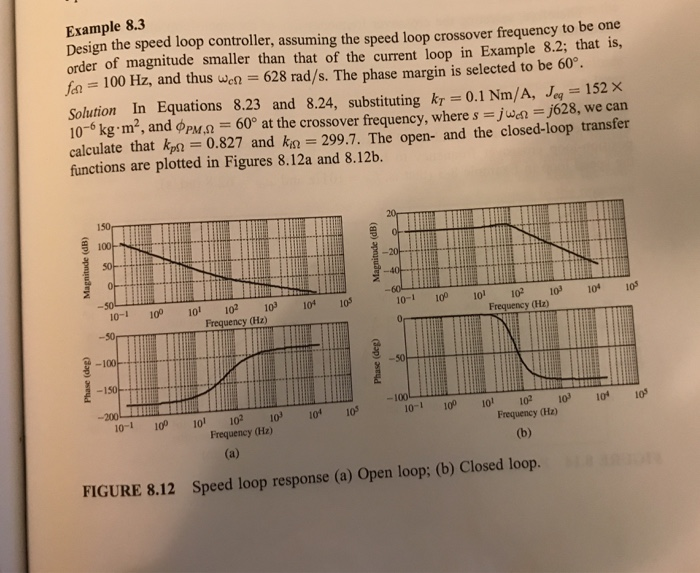
6. In Example 8.3 of your textbook, design the speed-loop controller, without the inner current loop, as shown in Figure 3, for the same crossover frequency and phase margin as in Example 8.3. Compare results with the system of Example 8.3. Figure 3. Example 8.3 Design the speed loop controller, assuming the speed loop crossover frequency to be one order of magnitude smaller than that of the current loop in Example 8.2; that 15, fo= 100 Hz, and thus won = 628 rad/s. The phase margin is selected to be 60. Solution In Equations 8.23 and 8.24, substituting ky = 0.1 Nm/A, Jeg = 152 % 10-6 kg.m, and PM. = 60 at the crossover frequency, where s = jw =j628, we can calculate that kpl = 0.827 and kn = 299.7. The open- and the closed-loop transfer functions are plotted in Figures 8.12a and 8.12b. Magnitude (dB) Magnitude (dB) -20- 50H 104 105 GOL 10-1 10% 104 100 --504 101 10 103 Frequency (Hz) 10-1 10 101 102 103 Frequency (Hz) -100- Phase (deg Phase -150 -1004 10-1 104 109 100 - 2004 104 101 102 103 Frequency (Hz) 10% 10-1 100 101 102 103 Frequency (Hz) (b) (a) FIGURE 8.12 Speed loop response (a) Open loop; (b) Closed loop. 6. In Example 8.3 of your textbook, design the speed-loop controller, without the inner current loop, as shown in Figure 3, for the same crossover frequency and phase margin as in Example 8.3. Compare results with the system of Example 8.3. Figure 3. Example 8.3 Design the speed loop controller, assuming the speed loop crossover frequency to be one order of magnitude smaller than that of the current loop in Example 8.2; that 15, fo= 100 Hz, and thus won = 628 rad/s. The phase margin is selected to be 60. Solution In Equations 8.23 and 8.24, substituting ky = 0.1 Nm/A, Jeg = 152 % 10-6 kg.m, and PM. = 60 at the crossover frequency, where s = jw =j628, we can calculate that kpl = 0.827 and kn = 299.7. The open- and the closed-loop transfer functions are plotted in Figures 8.12a and 8.12b. Magnitude (dB) Magnitude (dB) -20- 50H 104 105 GOL 10-1 10% 104 100 --504 101 10 103 Frequency (Hz) 10-1 10 101 102 103 Frequency (Hz) -100- Phase (deg Phase -150 -1004 10-1 104 109 100 - 2004 104 101 102 103 Frequency (Hz) 10% 10-1 100 101 102 103 Frequency (Hz) (b) (a) FIGURE 8.12 Speed loop response (a) Open loop; (b) Closed loop
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts