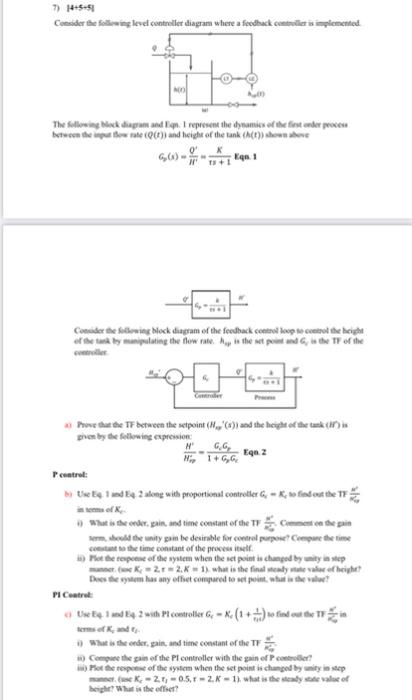
7) 14-551 Consider the following level controller diagram where a fedhack.com slemented The following back diagram and Ton. I represent the dynamics of the first ander proces between the powrote (06) and height of the tank (Ct)) 1 Consider the following block diagram of the feedback control loop to control the height of the tank by manipulating the flow rate. Nyhet punt and the Tr of the com Phove that the TF between the setpoint (1. (a) and the height of the tank 0 ks pre by the following expresion N GG En 2 control the Eqi med 2 along with proportional controller 6, ka filost the TF What is the order, pain, and time constant of the The pain om, hold the unity pan be desirable for control pore? Compare the time extent to the time constant of the procesi Met the response of the system when the set point is changed by its step 22. 1) what is the final way we of highe? Does they has any offset compared to set point what is the Pl Control Die Eiend E2 with Pl controller 6, - (1) o find out the TF terms of What is the onder, pain, and time constant of the TF Compare the pain of the Pl controller with the pain of control Pot the top of the system when the set point is clamped by itp K-21,-0.5.-2.-1). What is the value of hege What is the offset? 7) 14-551 Consider the following level controller diagram where a fedhack.com slemented The following back diagram and Ton. I represent the dynamics of the first ander proces between the powrote (06) and height of the tank (Ct)) 1 Consider the following block diagram of the feedback control loop to control the height of the tank by manipulating the flow rate. Nyhet punt and the Tr of the com Phove that the TF between the setpoint (1. (a) and the height of the tank 0 ks pre by the following expresion N GG En 2 control the Eqi med 2 along with proportional controller 6, ka filost the TF What is the order, pain, and time constant of the The pain om, hold the unity pan be desirable for control pore? Compare the time extent to the time constant of the procesi Met the response of the system when the set point is changed by its step 22. 1) what is the final way we of highe? Does they has any offset compared to set point what is the Pl Control Die Eiend E2 with Pl controller 6, - (1) o find out the TF terms of What is the onder, pain, and time constant of the TF Compare the pain of the Pl controller with the pain of control Pot the top of the system when the set point is clamped by itp K-21,-0.5.-2.-1). What is the value of hege What is the offset