

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
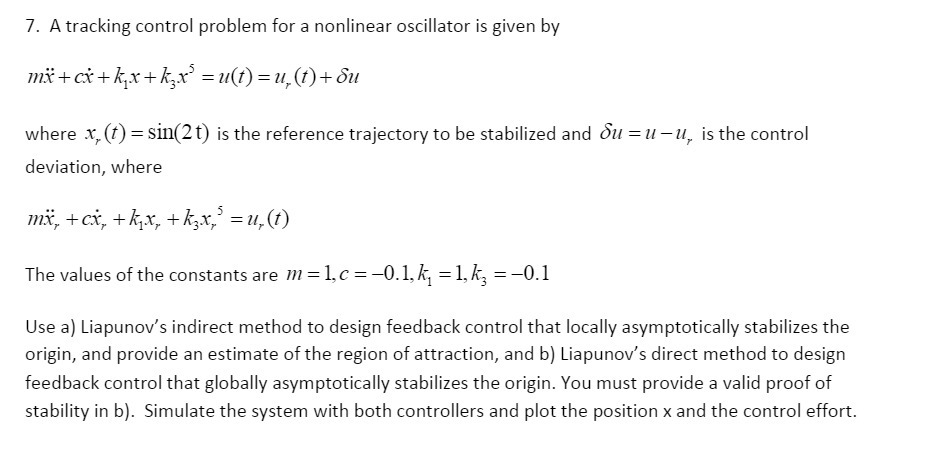
7. A tracking control problem for a nonlinear oscillator is given by mif+c+k1x+k3x5 = 2((3') = ur(t)+6u where xi?) = Sit](2t) is the reference trajectory
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Why Knot An Introduction To The Mathematical Theory Of Knots With Tangle
Authors: Colin Adams
1st Edition
0470413492, 978-0470413494