

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
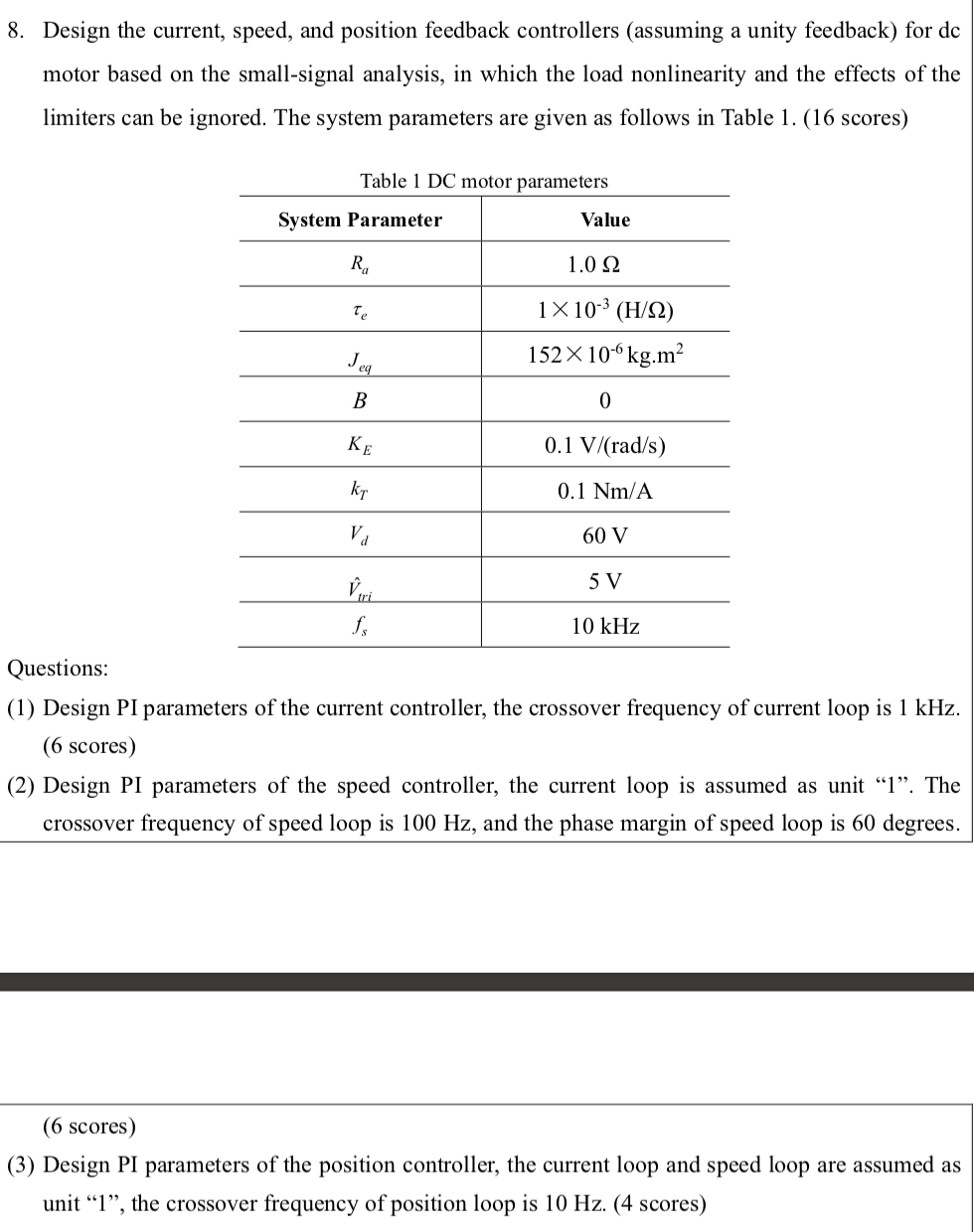
8. Design the current, speed, and position feedback controllers (assuming a unity feedback) for de motor based on the small-signal analysis, in which the load
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Auditing The Procurement Function The Iia Research Foundation Handbook Series
Authors: David O Regan, CIA, FCA
1st Edition
0894136224, 978-0894136221