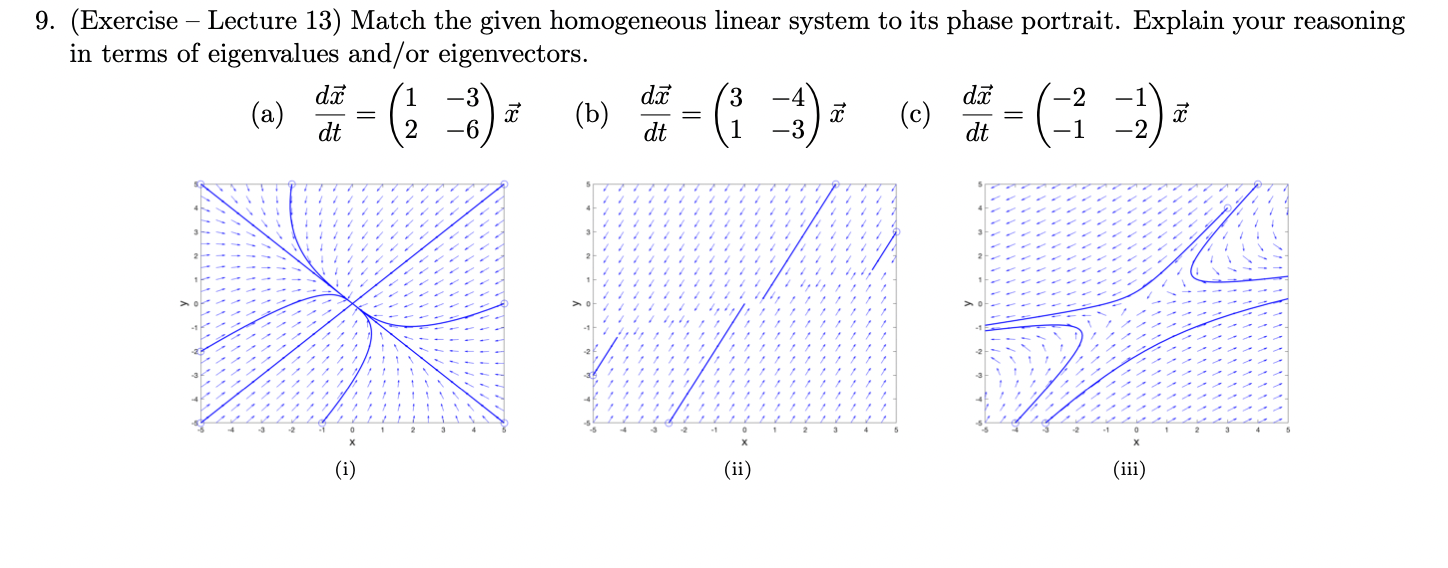
9. (Exercise , Lecture 13) Match the given homogeneous linear system to its phase portrait. Explain your reasoning in terms of eigenvalues and/ or eigenvectors.
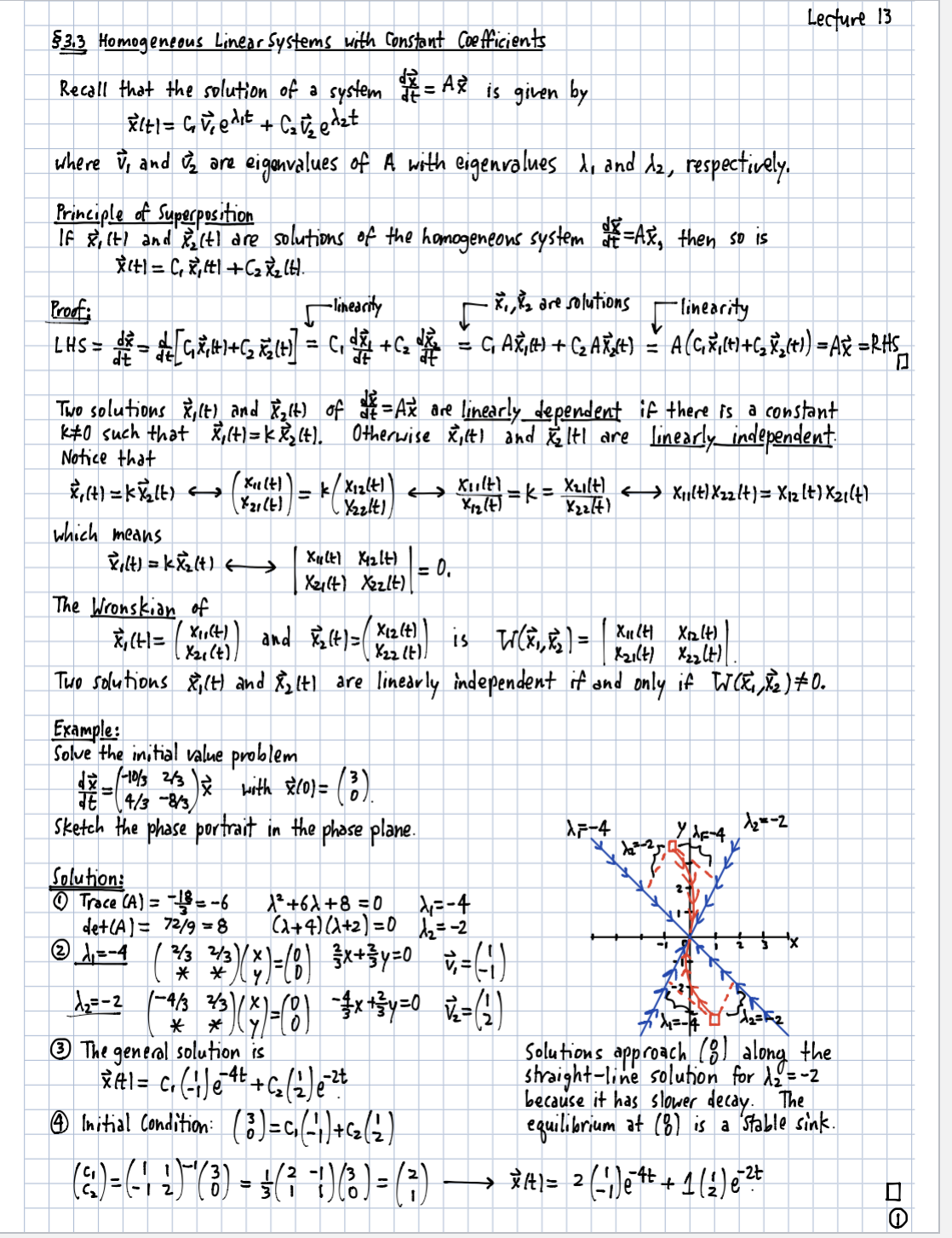
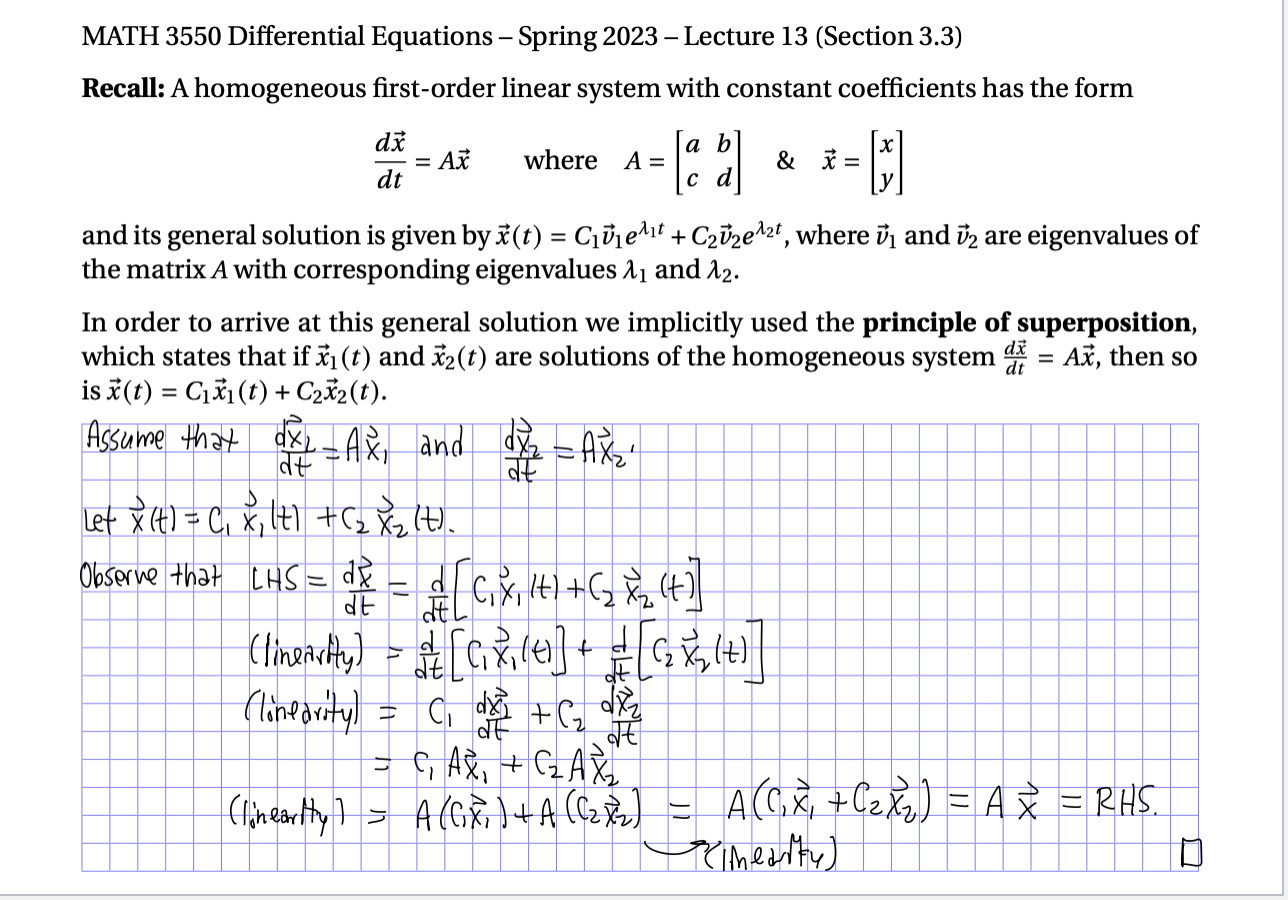
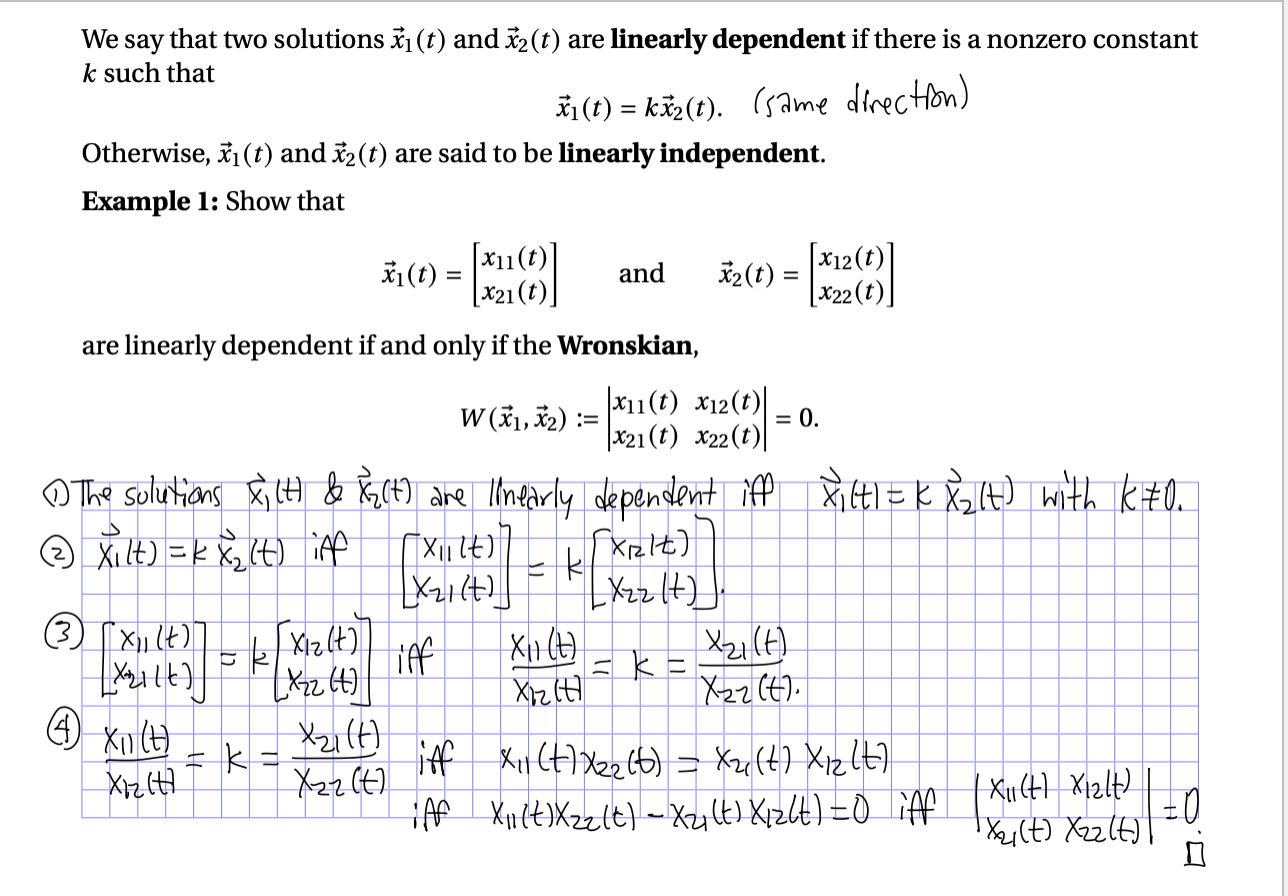
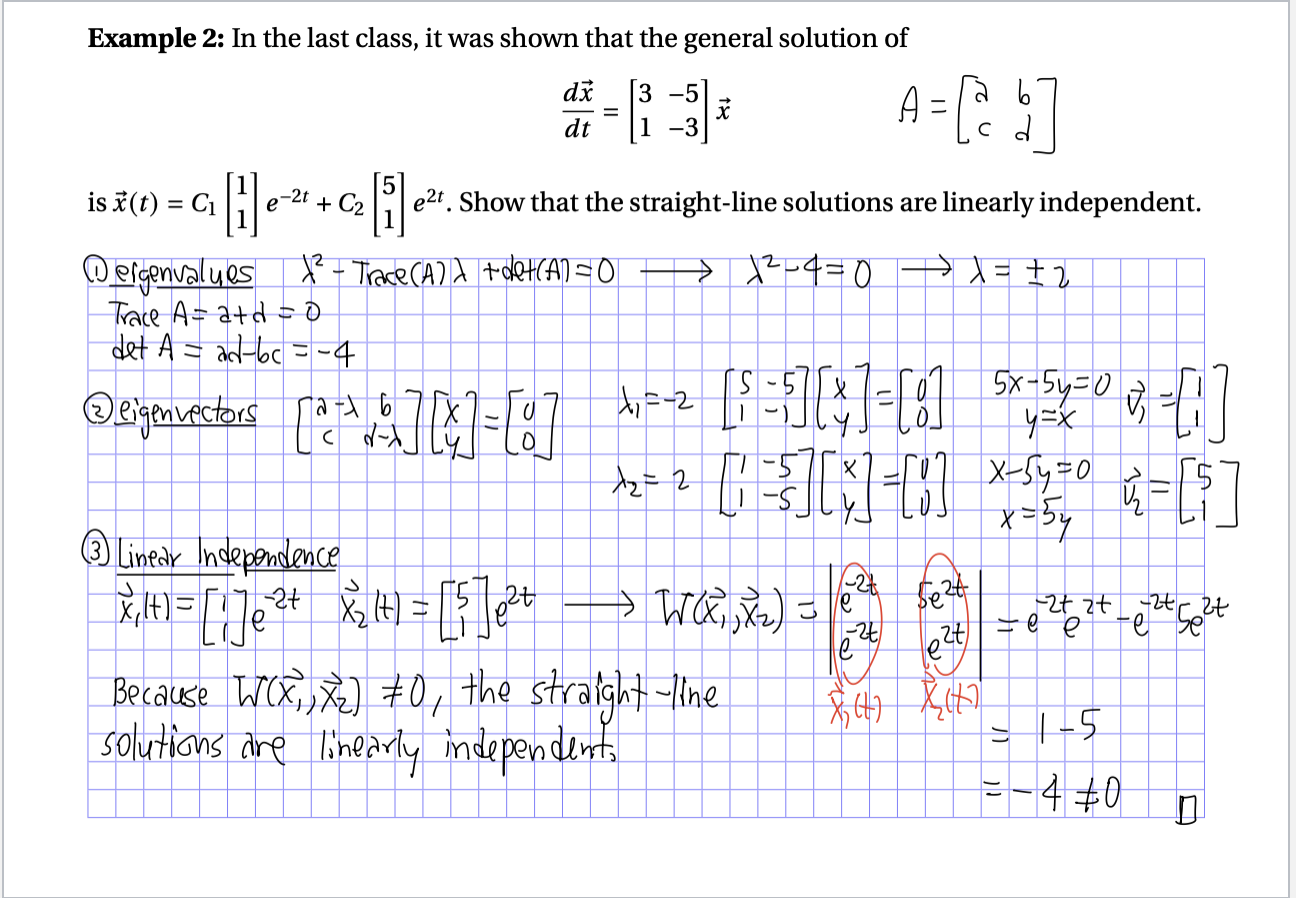
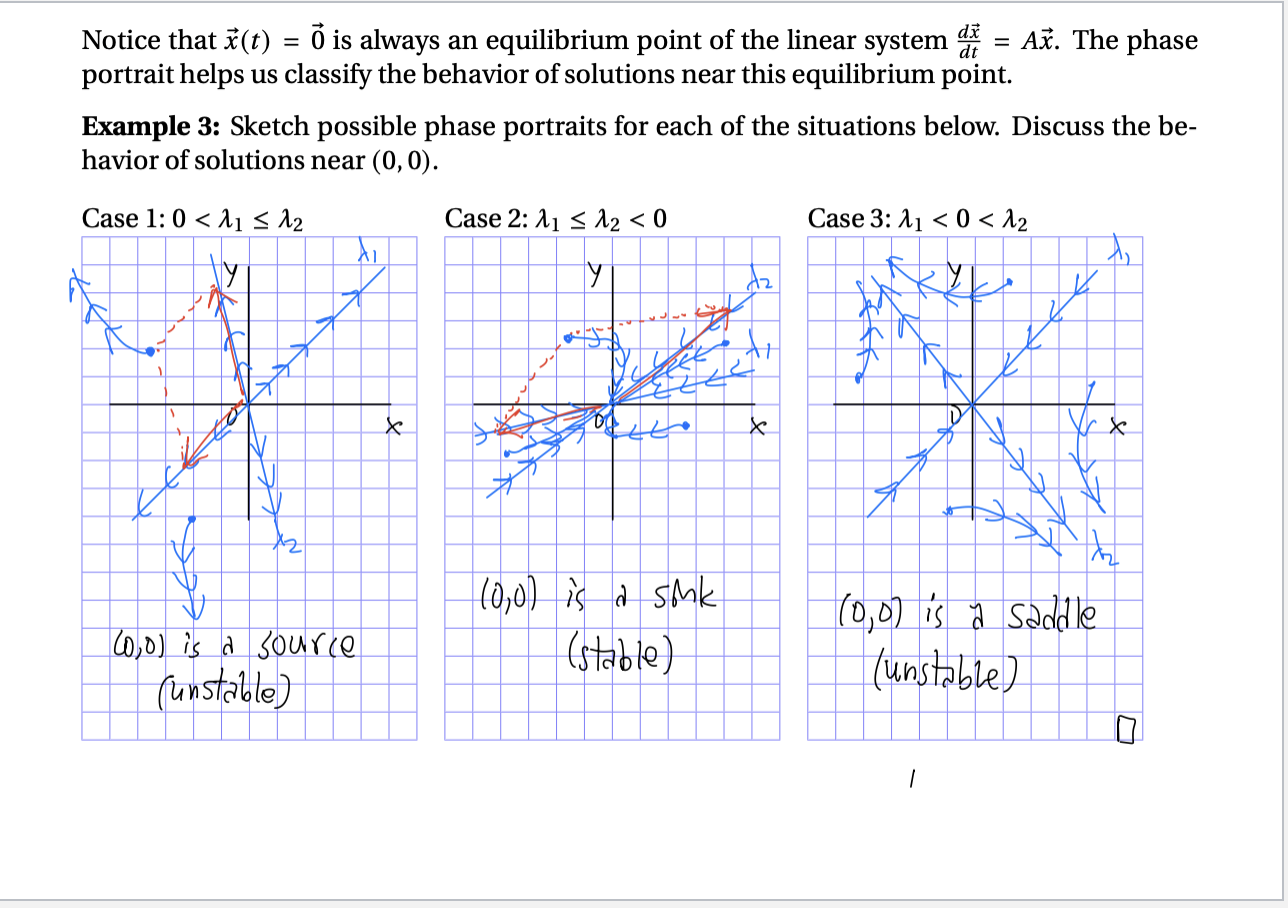
9. (Exercise , Lecture 13) Match the given homogeneous linear system to its phase portrait. Explain your reasoning in terms of eigenvalues and/ or eigenvectors. as; 1 3 a (a) E_ 2 6 I Lecture 13 $3.3 Homogeneous Linear Systems with Constant Coefficients Recall that the solution of a system it = AX is given by XIt1 = CV,edit + Cav, edit where V , and uz are eigenvalues of A with eigenvalues 1, and 12, respectively. Principle of Superposition If 8, (t) and 1, It) are solutions of the homogeneous system de = Ax, then so is X(1 = C, X, HI + C2 X2 CH). Proof: -linearity *, are solutions linearity LHS = = & GRANGE( = CE + G= GAR,HI + GARI) = A(GR,(+CX, (+) = AX = RHS Two solutions X, It) and x , It) of at = Ax are linearly dependent if there is a constant K#0 such that X,(+)= kx,(+). Otherwise xilt) and xaltl are linearly independent. Notice that = k X12(t) Xultl- ( Xzz/t) X,() = K = (2It XIN(t ) X22/t ) = X12 (t) X21(t) which means X2() X22/t) = 0. The Wronskion of X21 (t ) *, (+ 1= *ult! )and *2(t )= X12(+) 1X 22 (4 ) is w ( X ,, *2 ) = Kai(t) X2z () . Two solutions , (t) and X2 (t) are linearly independent if and only if WCE, X2 ) $ 0. Example: Solve the initial value problem dy -10/3 2/3 x with (0)= (8) It 4 /3 - 8/3/ Sketch the phase portrait in the phase plane. XF-4 12 - - 2 Solution: Trace (A) = 18-6 12+ 6 ) +8 =0 1/=-4 det(A ) = 72/9 = 8 (x + 4) (1+2) = 0 /2 = - 2 x ( 2/3 2/3 )( x ) =/0 1 3X + By= 0 V.= (-" ) 12= - 2 * (-4/3 2/3 ( X ) =10) -# x +34=0 V2= (4 The general solution is Solutions approach (8) along the XAI = cr(- iJet + C=( L )e-2t straight-line solution for 12 = -2 because it has slower decay. The 4 Initial Condition : (8)= 6(-)+62(2) equilibrium at (8) is a stable sink.MATH 3550 Differential Equations - Spring 2023 - Lecture 13 (Section 3.3) Recall: A homogeneous first-order linear system with constant coefficients has the form dx where A = a b = Ax dt c d & * = and its general solution is given by x(t) = CIUjelit + C2Uze12, where i and 12 are eigenvalues of the matrix A with corresponding eigenvalues 1 1 and 12. In order to arrive at this general solution we implicitly used the principle of superposition, which states that if x1 (t) and x2(t) are solutions of the homogeneous system ax = Ax, then so is x(t) = Cixi(t) + C2x2(t). Assume that dx 1 - Ax , and 8x 2 = AXz ' Let x (+) = C1 x, It1 + (2 x2 ( t ). Observe that LHS = dx - dt (linearity ) Fix Cix,(tilt = (exalt ) (linearity = C1 2 + ( 2 # = GAX , + CAX, ( linearity ) = A(GR, ) + A ( ( 2x ) A ( C X, + ( 2 /2) = AX = RHS. Primearty )We say that two solutions x1 (t) and x2 (t) are linearly dependent if there is a nonzero constant k such that x1(t ) = kxz(t). (same direction) Otherwise, x1(t) and x2(t) are said to be linearly independent. Example 1: Show that *1(t ) X11(t) ] and X2 ( t ) = X12 (t) *21 ( t ) *22 (t) are linearly dependent if and only if the Wronskian, W ( X 1 , X2 ) := x11 (t) x12(t) x21 (t) X22 (t) 1 = 0. (D The solutions x, (t & *z(t) are linearly dependent iff XIHIER XIED with KEO . )XIIt ) = K X, (() if " XiICE ) K [ XRIt ) XZI(t ) K / X12 ( t ) X 1 (4 ) X zZ ( t ) = KE X2(t ) XIzit) Xzz (t). XII (t ) Xzz ( t ) iff KIT(HIX 2() = *2 (t ) Xizlt) XU(H XIzlt ) X (t) Xzz(t)|Example 2: In the last class, it was shown that the general solution of dx 3 -5 81 dt A = [ 26] is x ( t) = Ci [1 2 + C2 5Jet, Show that the straight line solutions are linearly independent. @Bergenvalues - Trace ( A)) + chet ( A) = 0 Trace A= atd = 0 det A = ad-be = -4 5x -54=10 2) eigen vectors y= * X- Sy=0 X - 34 (3) Linear Independence -24 X IE *2 It) = 5 2t -2t e Because W (X , , x2 ) #0 , the straight- line solutions are linearly independent, = -4+0 0Notice that x(t) = 0 is always an equilibrium point of the linear system at = Ax. The phase portrait helps us classify the behavior of solutions near this equilibrium point. Example 3: Sketch possible phase portraits for each of the situations below. Discuss the be- havior of solutions near (0, 0). Case 1: 0
Step by Step Solution
There are 3 Steps involved in it
Step: 1
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2
Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance