

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
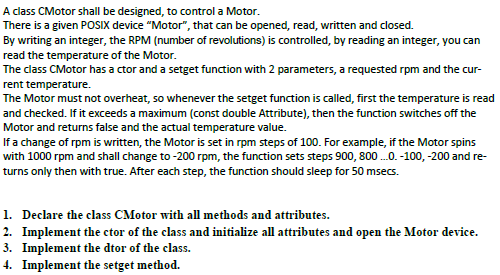
A class CMotor shall be designed, to control a Motor. There is a given POSIX device Motor, that can be opened, read, written and closed.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Employee Relations Audits
Authors: C. Jennings, W. E. J. McCarthy, R. Undy
1st Edition
0415786614, 978-0415786614