

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
a) Consider the 3R planar robot manipulator schematic shown in Fig. 1. Based on the Forward Kinematics, the end effector coordinates (position and Orientation;
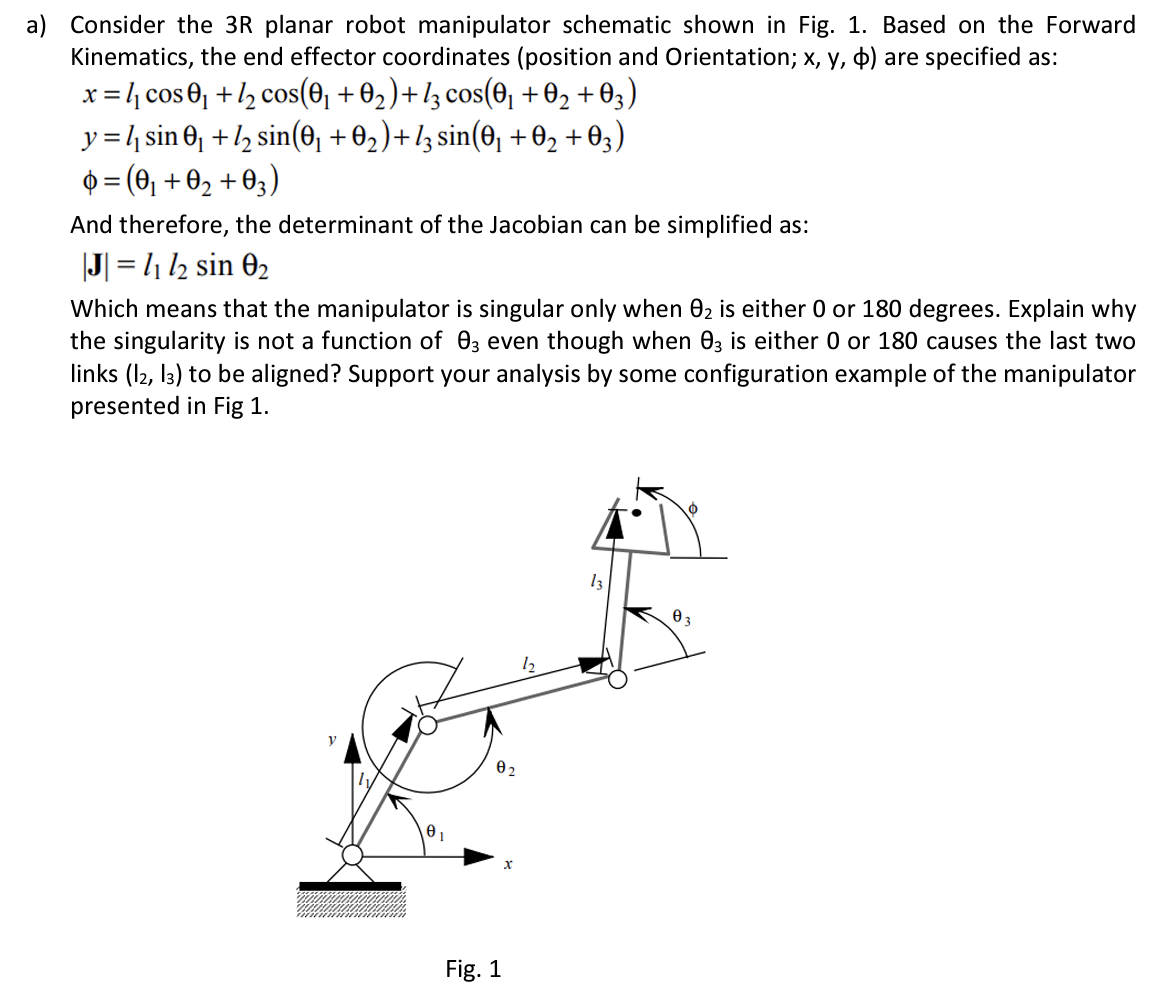
a) Consider the 3R planar robot manipulator schematic shown in Fig. 1. Based on the Forward Kinematics, the end effector coordinates (position and Orientation; x, y, d) are specified as: x=+ (0 +0 ) + 13 cos(0 +0 +03) y = sin 0 + sin(0 +0 )+ 73 sin(0 + 0 +03) 0 = (0 +0 +03) And therefore, the determinant of the Jacobian can be simplified as: |J| = 1 1 sin 0 Which means that the manipulator is singular only when 0 is either 0 or 180 degrees. Explain why the singularity is not a function of 03 even though when 03 is either 0 or 180 causes the last two links (12, 13) to be aligned? Support your analysis by some configuration example of the manipulator presented in Fig 1. 0 02 Fig. 1 x 13 ;
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Income Tax Fundamentals 2013
Authors: Gerald E. Whittenburg, Martha Altus Buller, Steven L Gill
31st Edition
1111972516, 978-1285586618, 1285586611, 978-1285613109, 978-1111972516