

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
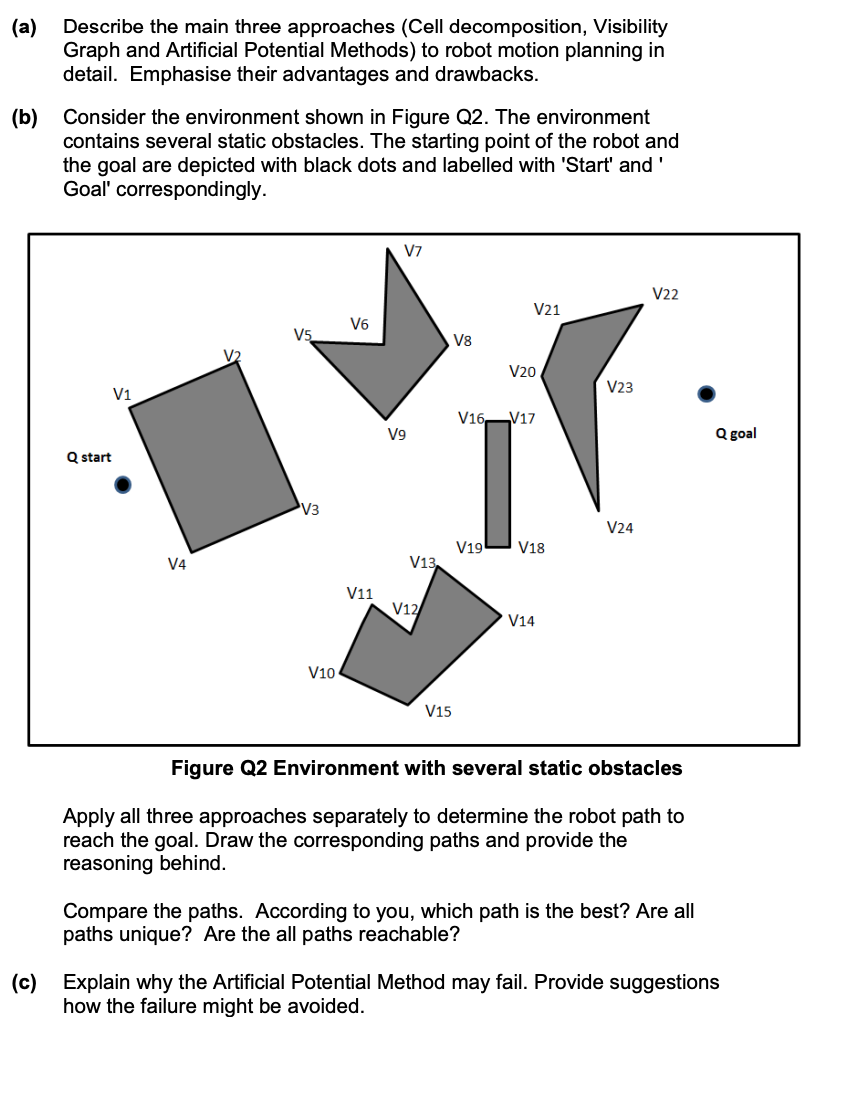
(a) Describe the main three approaches (Cell decomposition, Visibility Graph and Artificial Potential Methods) to robot motion planning in detail. Emphasise their advantages and drawbacks.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Lab Manual For Database Development
Authors: Rachelle Reese
1st Custom Edition
1256741736, 978-1256741732