

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
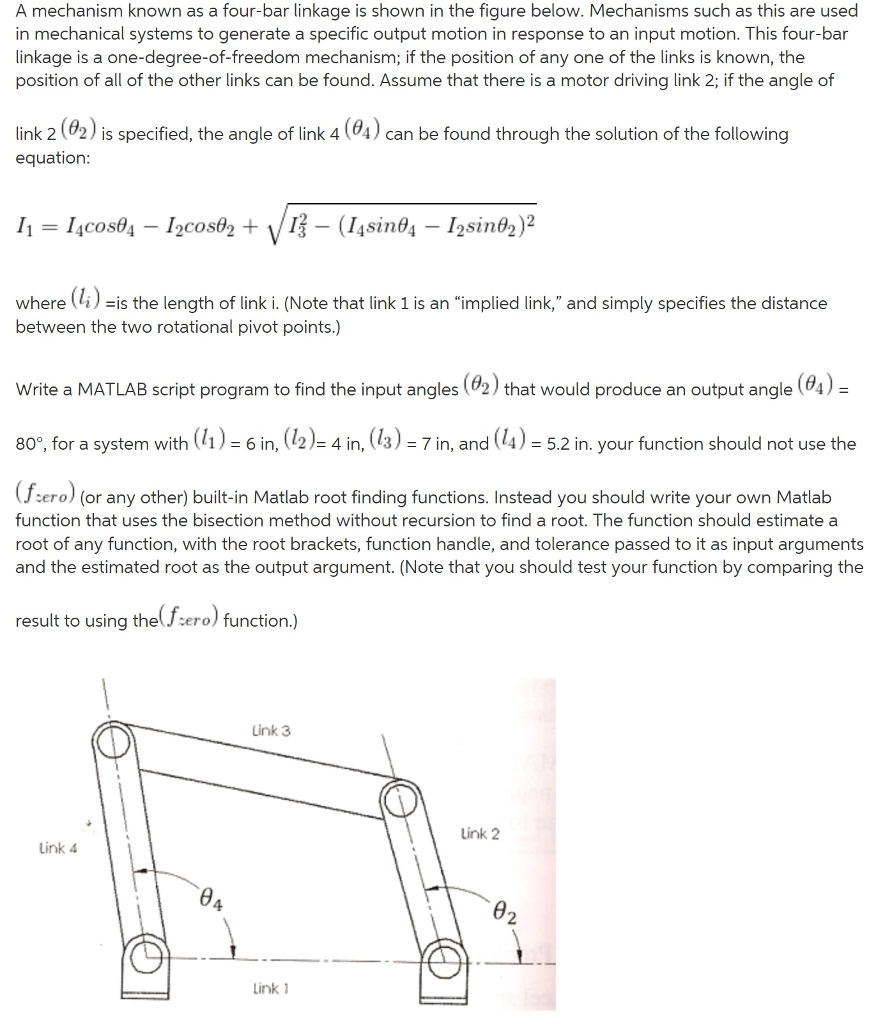
A mechanism known as a four-bar linkage is shown in the figure below. Mechanisms such as this are used in mechanical systems to generate a
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Transactions On Large Scale Data And Knowledge Centered Systems Xxviii Special Issue On Database And Expert Systems Applications Lncs 9940
Authors: Abdelkader Hameurlain ,Josef Kung ,Roland Wagner ,Qimin Chen
1st Edition
3662534541, 978-3662534540