

Question: A Segway s controlled by a state-space controler As the longtutinal direction is considered only (igure 4 1) the system can be described by
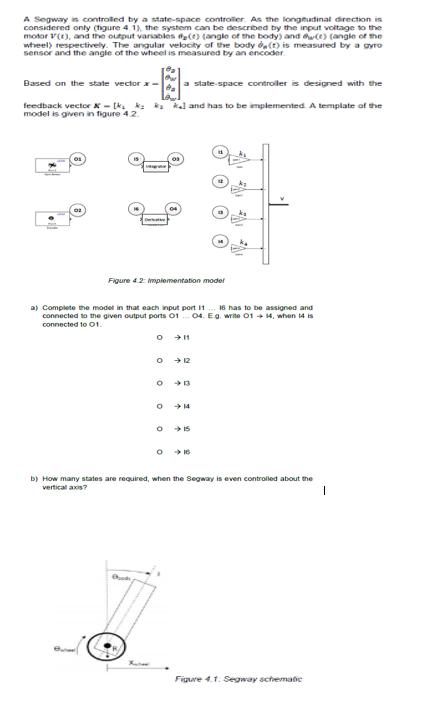
A Segway s controlled by a state-space controler As the longtutinal direction is considered only (igure 4 1) the system can be described by the input voitage to the motor V(), and the output vanables (e) (angle of the body) and e) (angle of the whheel) respectively. The angular velocity of ehe body d(t) is measured by a gyro sensor and the angle of the wheel is measured by an encoder Based on the state vector a-1a state space controller is designed with the feedback vector - k. k: kal and has to be implemented A template of the model is given in figure 42 De Figure 4.2 implementation modet a) Complete the model in that each input port 1. 16 has to be assigned and connected to the given output ports O1 04. Eg. write 01 + 4, when 14 is connected to O1. 12 13 + 14 15 16 b) How many states are required, when the Segway is even controlled about the vertical axis? . Figure 4.1. Segway schematie
Step by Step Solution
3.39 Rating (158 Votes )
There are 3 Steps involved in it
S635 GA8 R635115t Codo S Put 0 12 S2625 6165XV54 6... View full answer

Get step-by-step solutions from verified subject matter experts