

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Assume there is a differential-drive robot (find the parameters from the table according to your group ID) with two driving motors and one spherical
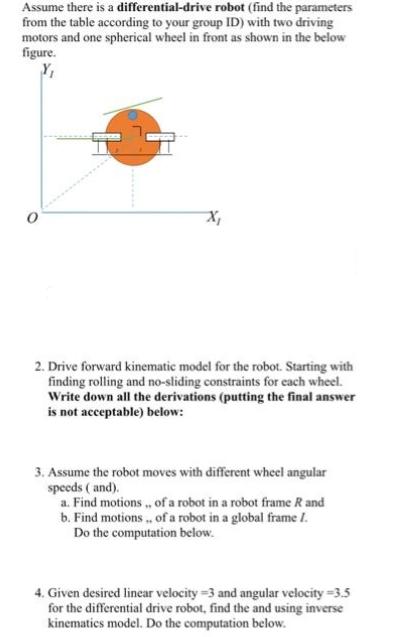
Assume there is a differential-drive robot (find the parameters from the table according to your group ID) with two driving motors and one spherical wheel in front as shown in the below figure. 2. Drive forward kinematic model for the robot. Starting with finding rolling and no-sliding constraints for each wheel. Write down all the derivations (putting the final answer is not acceptable) below: 3. Assume the robot moves with different wheel angular speeds (and). a. Find motions, of a robot in a robot frame R and b. Find motions.. of a robot in a global frame I. Do the computation below. 4. Given desired linear velocity -3 and angular velocity =3.5 for the differential drive robot, find the and using inverse kinematics model. Do the computation below.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Modern Control Systems
Authors: Richard C. Dorf, Robert H. Bishop
12th edition
136024580, 978-0136024583