

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
b. Even coefficients of characteristic equation. c. 1st element is odd and others are even. d. Non of the above. 5. Static error is a.
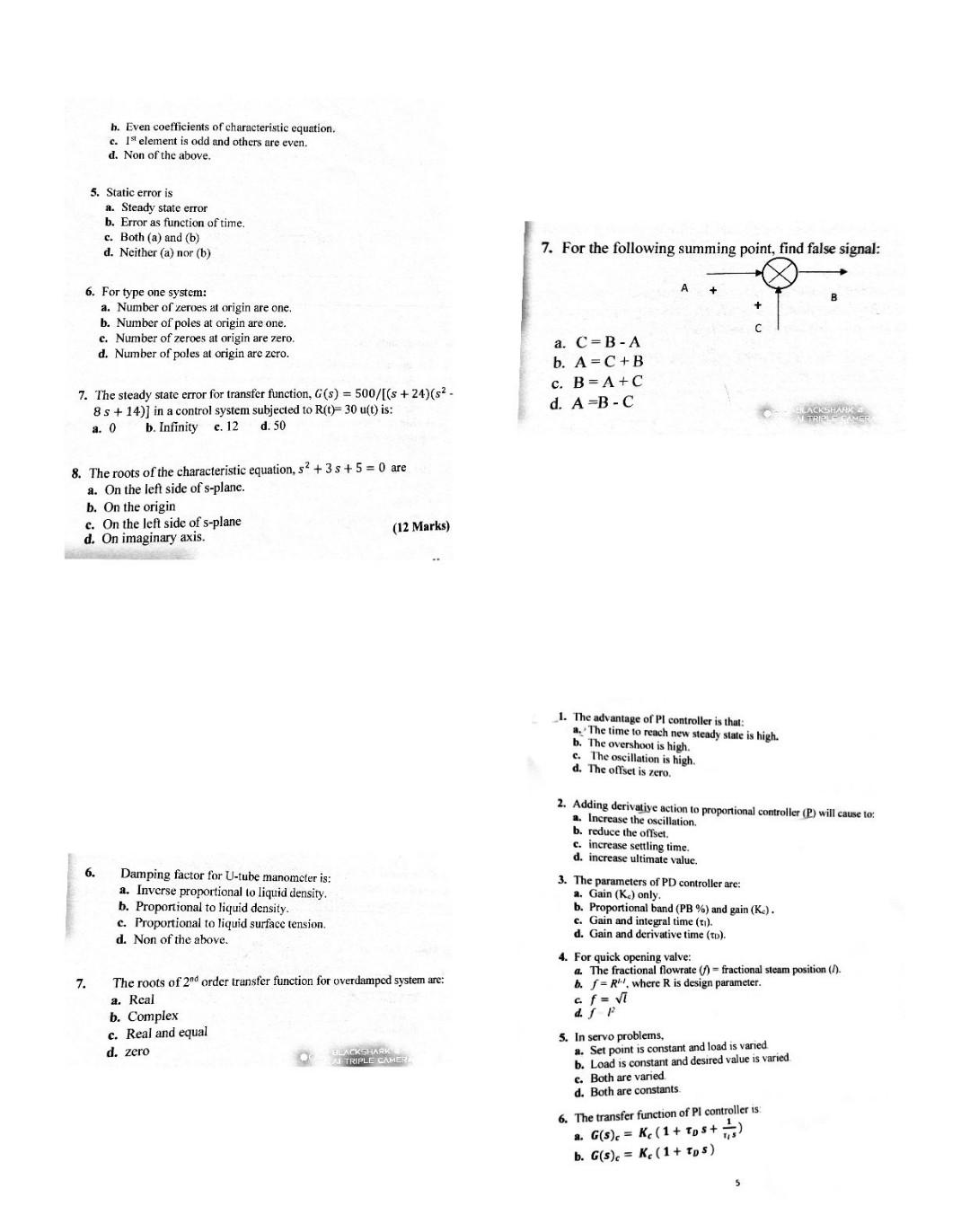
b. Even coefficients of characteristic equation. c. 1st element is odd and others are even. d. Non of the above. 5. Static error is a. Steady state error b. Error as function of time. c. Both (a) and (b) d. Neither (a) nor (b) 7. For the following summing point, find false signal: 6. For type one system: a. Number of zeroes at origin are one. b. Number of poles at origin are one. c. Number of zeroes at origin are zero. d. Number of poles at origin are zero. a. C=BA b. A=C+B 7. The steady state error for transfer function, G(s)=500/[(s+24)(s2 - c. B=A+C 8s+14)] in a control system subjected to R(t)=30u(t) is: d. A=BC a. 0 b. Infinity c. 12 d. 50 8. The roots of the characteristic equation, s2+3s+5=0 are a. On the left side of s-plane. b. On the origin c. On the left side of s-plane d. On imaginary axis. (12 Marks) 1. The advantage of PI controller is that: a. The time to reach new steady state is high. b. The overshoot is high. c. The oscillation is high. d. The offset is zero. 2. Adding derivatiye action to proportional controller (P) will cause to: a. Increase the oscillation. b. reduce the offset. c. increase settling time. d. increase ultimate value. 6. Damping factor for U-tube manometer is: 3. The parameters of PD controller are: a. Inverse proportional to liquid density. a. Gain (Kc) only. b. Proportional to liquid density. b. Proportional band (PB \%) and gain (Kc). c. Proportional to liquid surface tension. c. Gain and integral time ( 1). d. Non of the above. 4. For quick opening valve: a. The fractional flowrate (f)= fractional steam position (i). 7. The roots of 2nd order transfer function for overdamped system are: b. f=Rll., where R is design parameter. a. Real c. f=t b. Complex d. fp2 c. Real and equal 5. In servo problems, d. zero a. Set point is constant and load is varied b. Load is constant and desired value is varied. c. Both are varied. d. Both are constants. 6. The transfer function of Pl controller is: a. G(s)c=Kc(1+Ds+Tis1) b. G(s)c=Kc(1+Ds)
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
An Introduction To Fluid Mechanics
Authors: Faith A. Morrison
1st Edition
1107003539, 9781107003538