

Question
can you help me below is my code using python could you correct it please. print ('Program started') sim.simxFinish(-1) # just in case, close all
 can you help me below is my code using python could you correct it please.
can you help me below is my code using python could you correct it please.
print ('Program started') sim.simxFinish(-1) # just in case, close all opened connections
clientID=sim.simxStart('127.0.0.1',19997,True,True,5000,5) # Connect to CoppeliaSim if clientID != -1: print ('Connected to remote API server') else: print('Connection failed!!') sys.exit('Could not connect') bot = LineTracerRobot(sim, clientID)
#looking for false to find line while time.time()-startTime
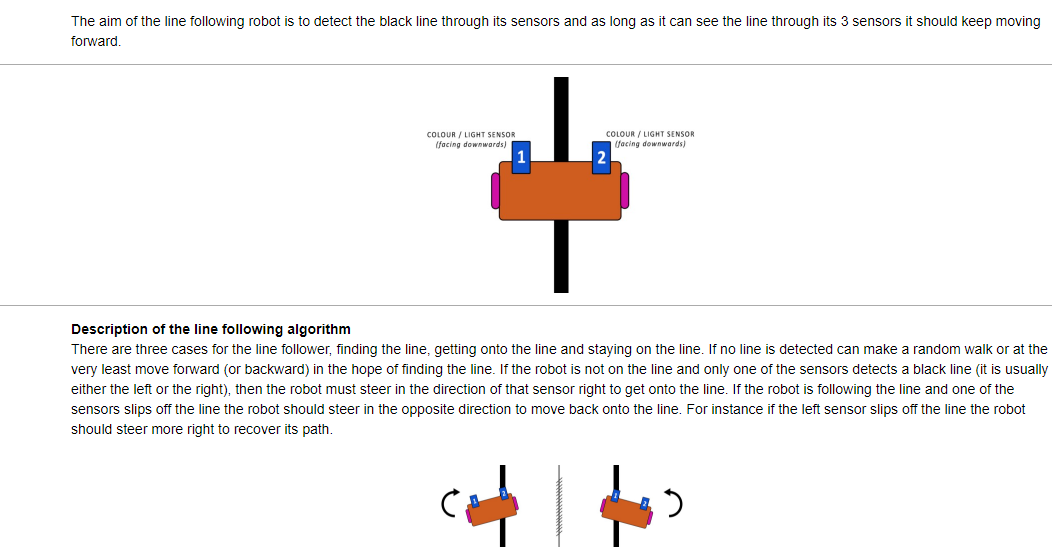
The aim of the line following robot is to detect the black line through its sensors and as long as it can see the line through its 3 sensors it should keep moving forward. Description of the line following algorithm There are three cases for the line follower, finding the line, getting onto the line and staying on the line. If no line is detected can make a random walk or at the very least move forward (or backward) in the hope of finding the line. If the robot is not on the line and only one of the sensors detects a black line (it is usually either the left or the right), then the robot must steer in the direction of that sensor right to get onto the line. If the robot is following the line and one of the sensors slips off the line the robot should steer in the opposite direction to move back onto the line. For instance if the left sensor slips off the line the robot should steer more right to recover its path
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Finance The Role Of Data Analytics In Manda Due Diligence
Authors: Ps Publishing
1st Edition
B0CR6SKTQG, 979-8873324675