

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
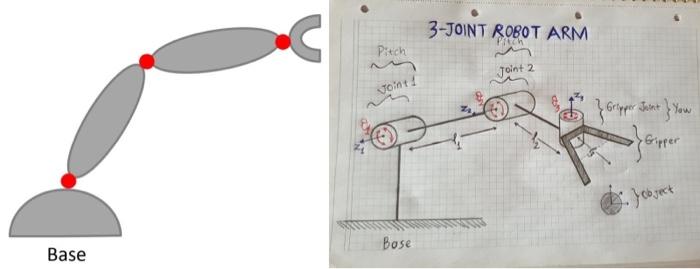
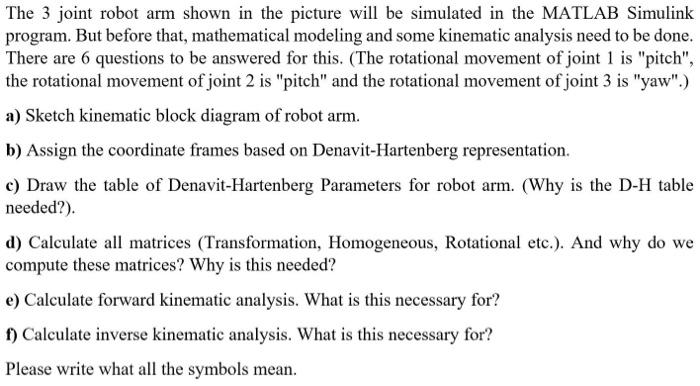
can you please explain clearly. thx. 3-JOINT ROBOT ARM Pitch Joint 2 Joint! } Gripper Junt } you Gripper 1 Yobject Bose Base The 3
can you please explain clearly. thx.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Rules In Database Systems Second International Workshop Rids 95 Glyfada Athens Greece September 25 27 1995 Proceedings Lncs 985
Authors: Timos Sellis
1995th Edition
3540603654, 978-3540603658