

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Check if a is correct than help with b please..................... b ) Suppose the robot is commanded to move to a new position Pj (
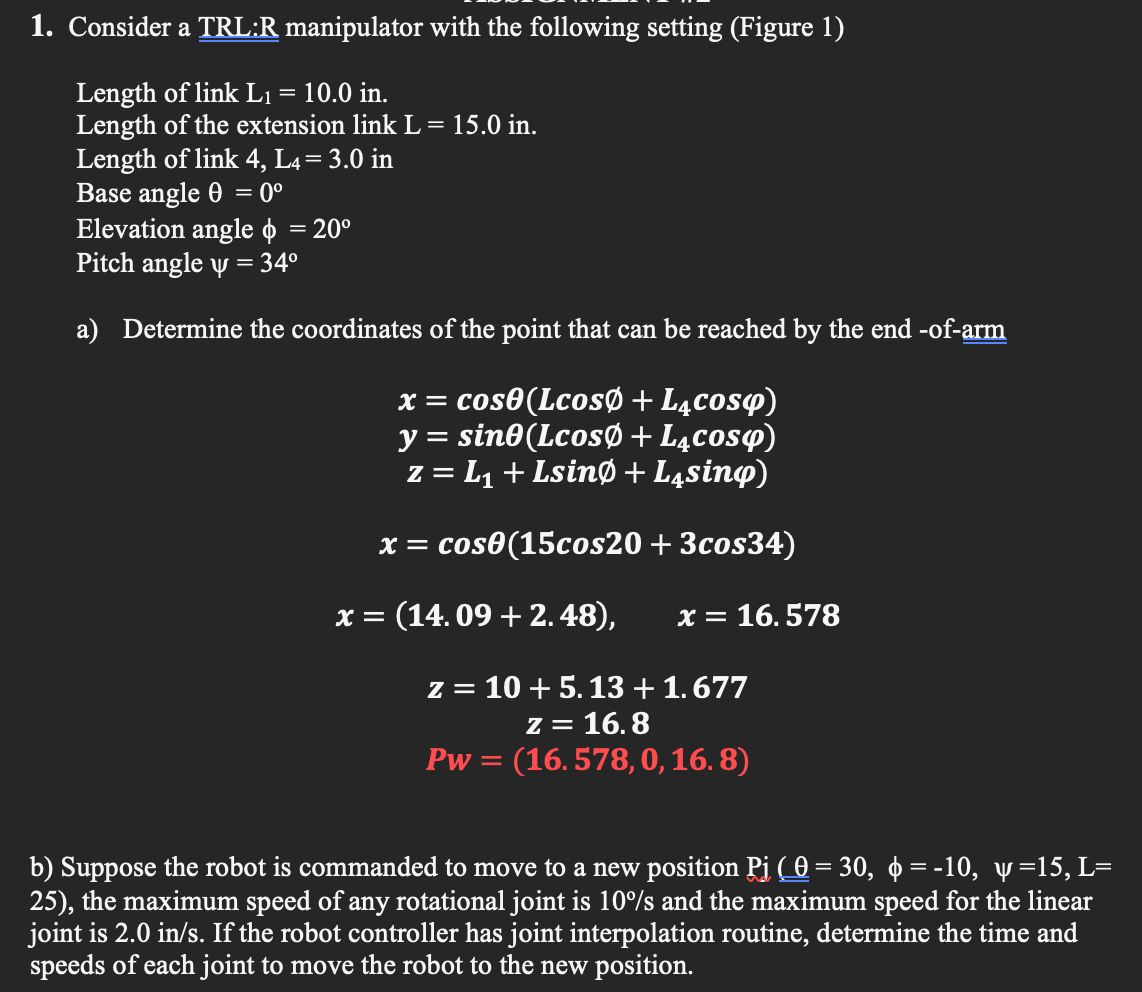
Check if a is correct than help with b please..................... b Suppose the robot is commanded to move to a new position Pj L the maximum speed of any rotational joint is os and the maximum speed for the linear joint is ins If the robot controller has joint interpolation routine, determine the time and speeds of each joint to move the robot to the new position.sConsider a TRL:R manipulator with the following setting Figure
Length of link
Length of the extension link
Length of link
Base angle
Elevation angle
Pitch angle
a Determine the coordinates of the point that can be reached by the end ofarm
:Lsin
b Suppose the robot is commanded to move to a new position
the maximum speed of any rotational joint is and the maximum speed for the linear
joint is If the robot controller has joint interpolation routine, determine the time and
speeds of each joint to move the robot to the new position.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Data Analytics With Sas Explore Your Data And Get Actionable Insights With The Power Of Sas
Authors: Nishant Sidana
1st Edition
9355515979, 978-9355515971