

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Consider a differential drive robot with a wheel base of 100mm and a wheel radius of 10mm. At full speed the robot travels at 20mm/s.
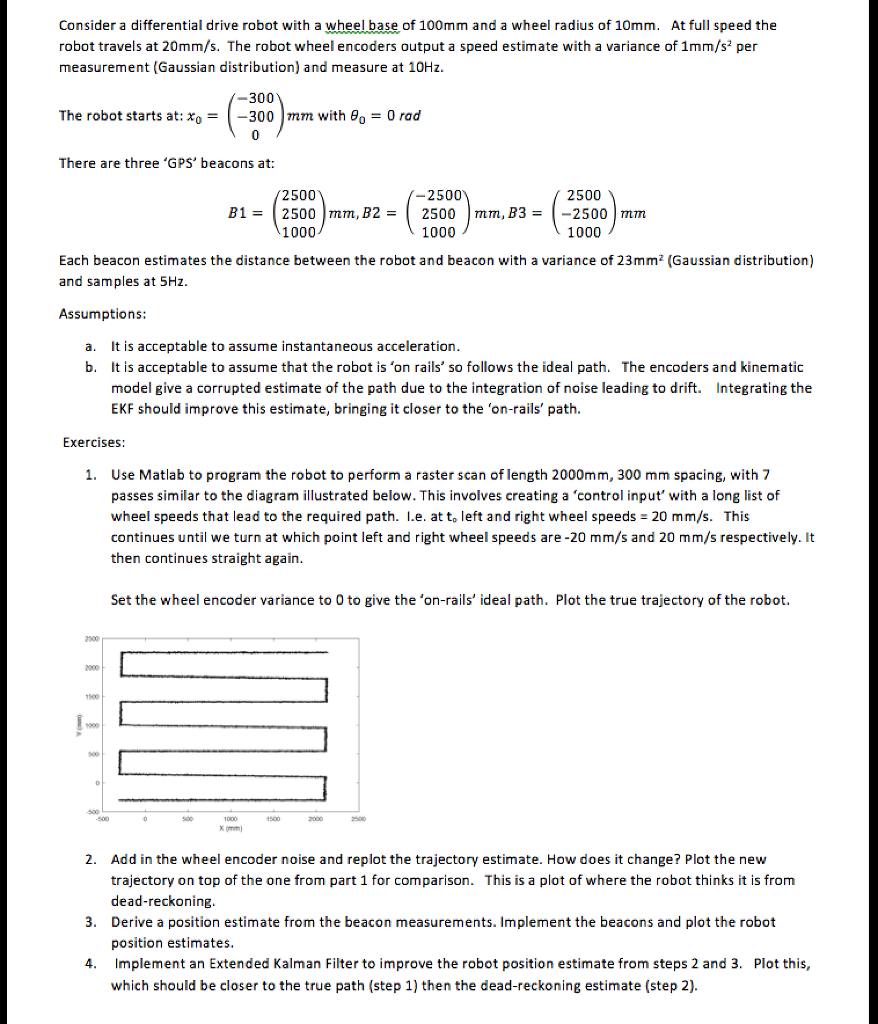
Consider a differential drive robot with a wheel base of 100mm and a wheel radius of 10mm. At full speed the robot travels at 20mm/s. The robot wheel encoders output a speed estimate with a variance of 1mm/s^2 per measurement (Gaussian distribution) and measure at 10Hz. The robot starts at: x_0 = (-300 -300 0) mm with theta_0 = 0 rad There are three 'GPS' beacons at: B_1 = (2500 2500 1000) mm, B2 = (-2500 2500 1000) mm, B_3 = (2500 -2500 1000) mm, each beacon estimates the distance between the robot and beacon with a variance of 23mm^2 (Gaussian distribution) and samples at 5Hz. It is acceptable to assume instantaneous acceleration. It is acceptable to assume that the robot is 'on rails' so follows the ideal path. The encoders and kinematic model give a corrupted estimate of the path due to the integration of noise leading to drift. Integrating the EKF should improve this estimate, bringing it closer to the 'on-rails' path. Use MATLAB to program the robot to perform a raster scan of length 2000mm, 300 mm spacing, with 7 passes similar to the diagram illustrated below. This involves creating a 'control input' with a long list of wheel speeds that lead to the required path. I.e. at t_0 left and right wheel speeds = 20 mm/s. This continues until we turn at which point left and right wheel speeds are -20 mm/s and 20 mm/s respectively. It then continues straight again. Set the wheel encoder variance to 0 to give the 'on-rails' ideal path. Plot the true trajectory of the robot. Add in the wheel encoder noise and replot the trajectory estimate. How does it change? Plot the new trajectory on top of the one from part 1 for comparison. This is a plot of where the robot thinks it is from dead-reckoning. Derive a position estimate from the beacon measurements. Implement the beacons and plot the robot position estimates. Implement an Extended Kalman Filter to improve the robot position estimate from steps 2 and 3. Plot this, which should be closer to the true path (step 1) then the dead-reckoning estimate (step 2)
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Oracle Database Foundations Technology Fundamentals For IT Success
Authors: Bob Bryla
1st Edition
0782143725, 9780782143720