

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
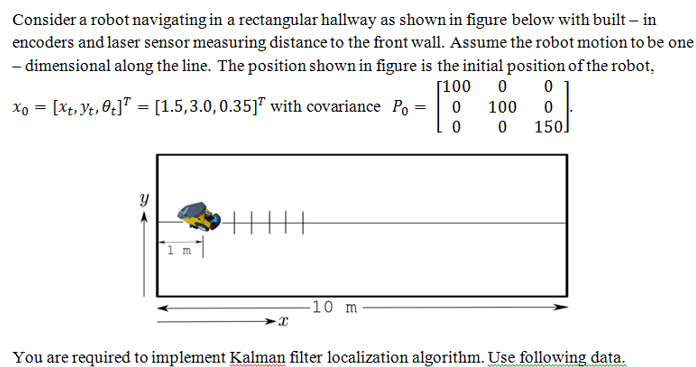
Consider a robot navigating in a rectangular hallway as shown in figure below with built - in encoders and laser sensor measuring distance to the
Consider a robot navigating in a rectangular hallway as shown in figure below with built in
encoders and laser sensor measuring distance to the front wall. Assume the robot motion to be one
dimensional along the line. The position shown in figure is the initial position of the robot,
with covariance
You are required to implement Kalman filter localization algorithm. Use following data.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Logics For Databases And Information Systems
Authors: Jan Chomicki ,Gunter Saake
1st Edition
1461375827, 978-1461375821