

Consider the problem of finding the shortest path between two points on a plane that has convex polygonal obstacles as shown below. This is
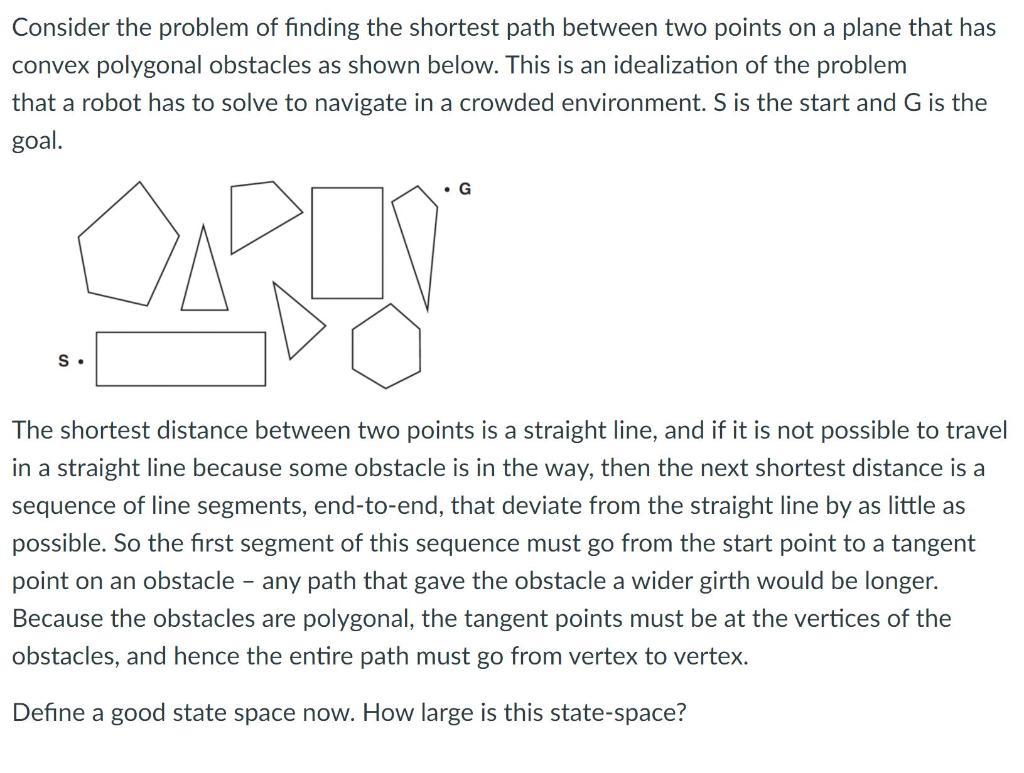
Consider the problem of finding the shortest path between two points on a plane that has convex polygonal obstacles as shown below. This is an idealization of the problem that a robot has to solve to navigate in a crowded environment. S is the start and G is the goal. G PARTY The shortest distance between two points is a straight line, and if it is not possible to travel in a straight line because some obstacle is in the way, then the next shortest distance is a sequence of line segments, end-to-end, that deviate from the straight line by as little as possible. So the first segment of this sequence must go from the start point to a tangent point on an obstacle - any path that gave the obstacle a wider girth would be longer. Because the obstacles are polygonal, the tangent points must be at the vertices of the obstacles, and hence the entire path must go from vertex to vertex. Define a good state space now. How large is this state-space?
Step by Step Solution
3.51 Rating (168 Votes )
There are 3 Steps involved in it
Step: 1
Solution xy possible states Infinite because you can have loops Because the shortest distance betwee...
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Authors: Stuart Russell, Peter Norvig
3rd edition
136042597, 978-0136042594