

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Consider the robot manipulator shown in Fig. 3, where the robot parameters including the lengths has ) to the been presented. a) Find the
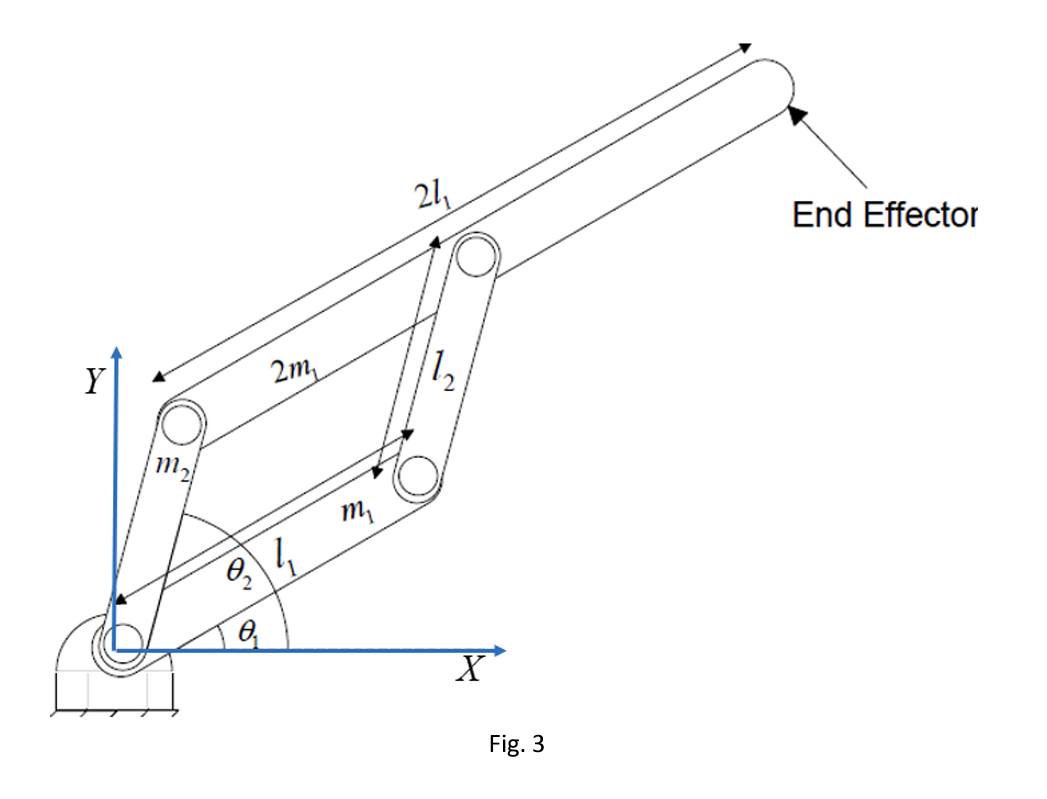
Consider the robot manipulator shown in Fig. 3, where the robot parameters including the lengths has ) to the been presented. a) Find the Forward Kinematics which maps the joins parameters (12, workspace parameters (x, y of the end-effector). [4] a) For any possible values of 1 2 11, mathematically drive the reachable workspace. (without any limitations on joint angels). [10] b) Find the basic Jacobian, Jo, for this manipulator which relates changes between workspace parameters (X, Y ) of the end - effector and the joint parameters. c) Find the singularities (with respect to linear velocity) of this manipulator.Fig. 3 Y m. 2m 24 0 m 24 X Fig. 3 End Effector
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Elements Of Chemical Reaction Engineering
Authors: H. Fogler
6th Edition
013548622X, 978-0135486221