

Question: Consider the speed control system for a DC motor with speed sensor and position sensor. Closed loop control system, its components and block diagram
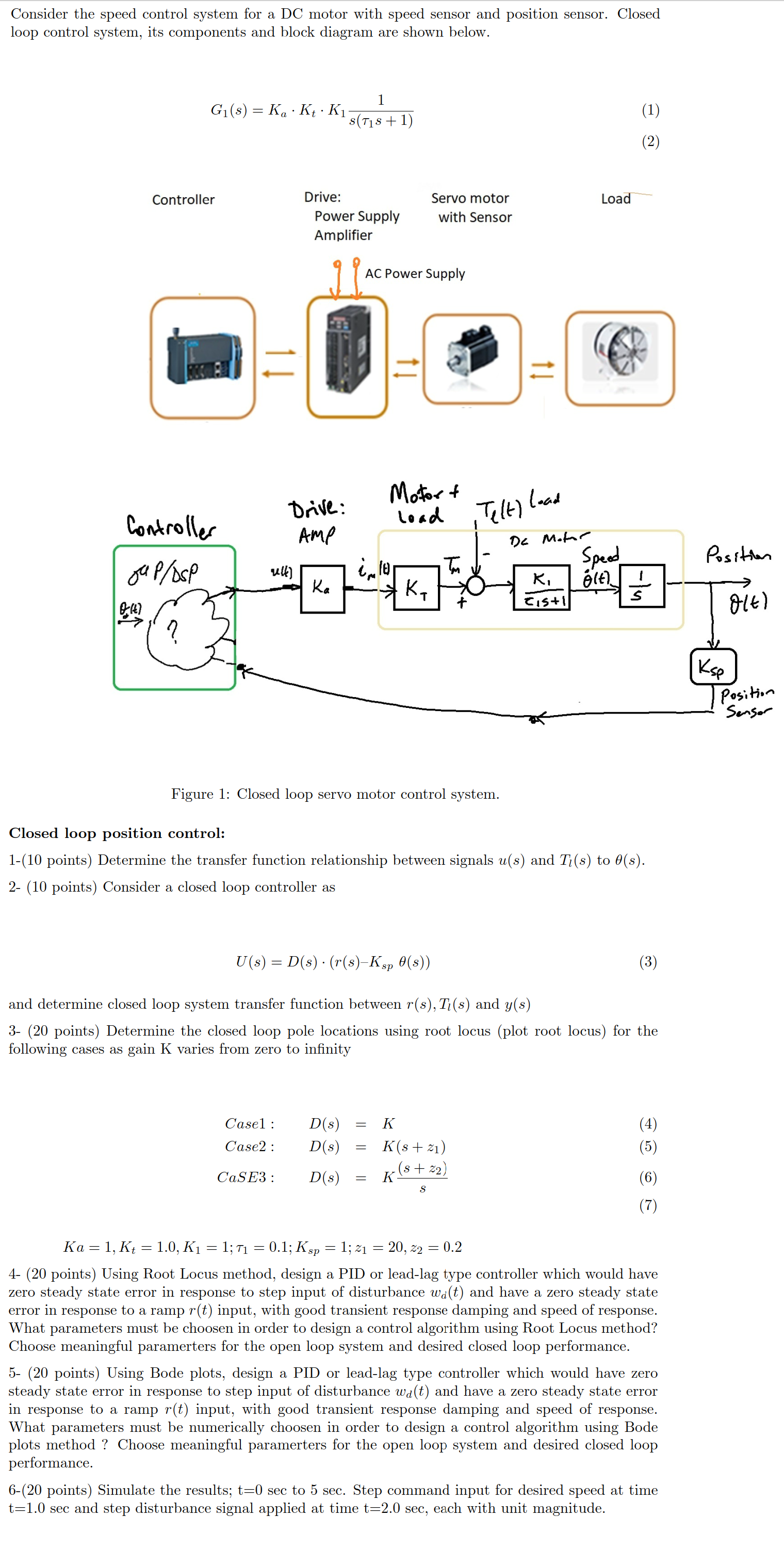
Consider the speed control system for a DC motor with speed sensor and position sensor. Closed loop control system, its components and block diagram are shown below. 1 G(s) = Ka Kt K . s(T18+1) Controller Drive: Servo motor Load Power Supply with Sensor Amplifier AC Power Supply Drive: Motor + Controller Jap/DSP Load Telt) load Amp Dc Motor ul) im T Speed Ka K K 8(+) 0-14) S Figure 1: Closed loop servo motor control system. Closed loop position control: 1-(10 points) Determine the transfer function relationship between signals u(s) and T(s) to (s). 2- (10 points) Consider a closed loop controller as (1) (2) U(s) = D(s) (r(s)Ksp (s)) and determine closed loop system transfer function between r(s), T(s) and y(s) (3) 3- (20 points) Determine the closed loop pole locations using root locus (plot root locus) for the following cases as gain K varies from zero to infinity Casel: D(s) Case2: D(s) = K (4) = K(s +21) CaSE3: D(s) = k (8 + 22) (6) S (5) (7) Ka = 1, K = 1.0, K = 1; 71 = 0.1; Ksp = 1; 21 = 20, 22 = 0.2 4- (20 points) Using Root Locus method, design a PID or lead-lag type controller which would have zero steady state error in response to step input of disturbance wa(t) and have a zero steady state error in response to a ramp r(t) input, with good transient response damping and speed of response. What parameters must be choosen in order to design a control algorithm using Root Locus method? Choose meaningful parameters for the open loop system and desired closed loop performance. 5- (20 points) Using Bode plots, design a PID or lead-lag type controller which would have zero steady state error in response to step input of disturbance wa(t) and have a zero steady state error in response to a ramp r(t) input, with good transient response damping and speed of response. What parameters must be numerically choosen in order to design a control algorithm using Bode plots method? Choose meaningful paramerters for the open loop system and desired closed loop performance. 6-(20 points) Simulate the results; t=0 sec to 5 sec. Step command input for desired speed at time t=1.0 sec and step disturbance signal applied at time t=2.0 sec, each with unit magnitude. Position Ksp Position Sensor
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts