

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
[CRAZYFLIE + LEAP MOTION] Image attached I need help in integrating these two devices wherein I will be able to control the CrazyFlie 2.0 with
[CRAZYFLIE + LEAP MOTION] Image attached I need help in integrating these two devices wherein I will be able to control the CrazyFlie 2.0 with a Leap Motion Controller. As of now, I'm stuck with the importing of libraries. Whenever I open the CrazyFlie PC Client, it says "Leap Motion libraries probably not installed" but I already have the Leap SDK, I just don't know where to put it. I believe the python code below is the leapmotion interface used for the CrazyFlie PC Client. Any help is much appreciated. Many thanks!
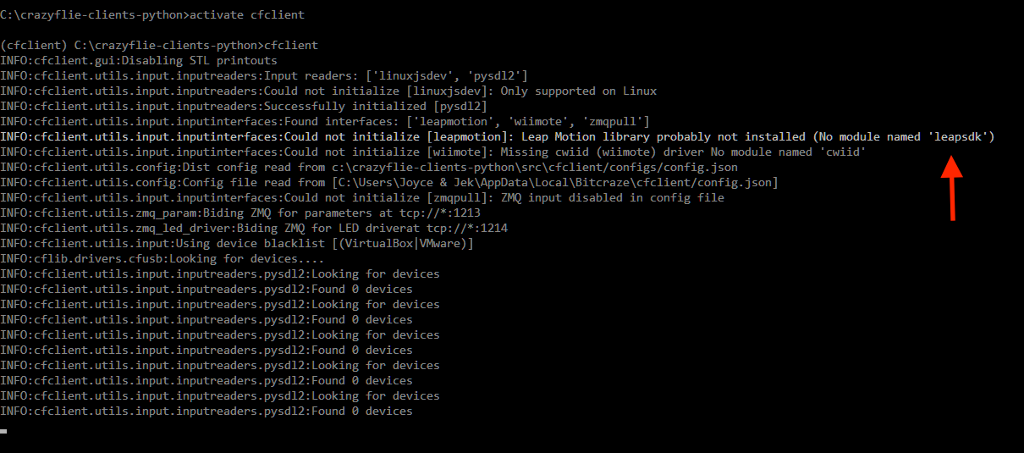
#!/usr/bin/env python # -*- coding: utf-8 -*- # # || ____ _ __ # +------+ / __ )(_) /_______________ _____ ___ # | 0xBC | / __ / / __/ ___/ ___/ __ `/_ / / _ \ # +------+ / /_/ / / /_/ /__/ / / /_/ / / /_/ __/ # || || /_____/_/\__/\___/_/ \__,_/ /___/\___/ # # Copyright (C) 2014 Bitcraze AB # # Crazyflie Nano Quadcopter Client # # This program is free software; you can redistribute it and/or # modify it under the terms of the GNU General Public License # as published by the Free Software Foundation; either version 2 # of the License, or (at your option) any later version. # # This program is distributed in the hope that it will be useful, # but WITHOUT ANY WARRANTY; without even the implied warranty of # MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the # GNU General Public License for more details. # You should have received a copy of the GNU General Public License # along with this program; if not, write to the Free Software # Foundation, Inc., 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301, # USA. """ Leap Motion reader for controlling the Crazyflie. Note that this reader needs the Leap Motion SDK to be manually copied. See src/leapsdk/__init__.py for more info. """ try: import leapsdk.Leap as Leap except Exception as e: raise Exception( "Leap Motion library probably not installed ({})".format(e)) import logging __author__ = 'Bitcraze AB' __all__ = ['LeapmotionReader'] logger = logging.getLogger(__name__) MODULE_MAIN = "LeapmotionReader" MODULE_NAME = "Leap Motion" class LeapListener(Leap.Listener): def set_data_callback(self, callback): self._dcb = callback self._nbr_of_fingers = 0 def on_init(self, controller): logger.info("Initialized") def on_connect(self, controller): logger.info("Connected") def on_disconnect(self, controller): # Note: not dispatched when running in a debugger. logger.info("Disconnected") def on_exit(self, controller): logger.info("Exited") def nbr_of_fingers(self): return self._nbr_of_fingers def on_frame(self, controller): # Get the most recent frame and report some basic information frame = controller.frame() data = {"roll": 0, "pitch": 0, "yaw": 0, "thrust": 0} if not frame.hands.is_empty: # Get the first hand hand = frame.hands[0] normal = hand.palm_normal direction = hand.direction # Pich and roll are mixed up... if len(hand.fingers) >= 4: data["roll"] = -direction.pitch * Leap.RAD_TO_DEG / 30.0 data["pitch"] = -normal.roll * Leap.RAD_TO_DEG / 30.0 data["yaw"] = direction.yaw * Leap.RAD_TO_DEG / 70.0 # Use the elevation of the hand for thrust data["thrust"] = (hand.palm_position[1] - 80) / 150.0 if data["thrust"] if data["thrust"] > 1.0: data["thrust"] = 1.0 self._dcb(data) class LeapmotionReader: """Used for reading data from input devices using the PyGame API.""" def __init__(self): # pygame.init() self._ts = 0 self._listener = LeapListener() self._listener.set_data_callback(self.leap_callback) self._controller = Leap.Controller() self._controller.add_listener(self._listener) self.name = MODULE_NAME self.limit_rp = True self.limit_thrust = True self.limit_yaw = True self.data = {"roll": 0.0, "pitch": 0.0, "yaw": 0.0, "thrust": -1.0, "estop": False, "exit": False, "assistedControl": False, "alt1": False, "alt2": False, "pitchNeg": False, "rollNeg": False, "pitchPos": False, "rollPos": False} logger.info("Initialized Leap") def open(self, deviceId): """ Initialize the reading and open the device with deviceId and set the mapping for axis/buttons using the inputMap """ return def leap_callback(self, data): for k in list(data.keys()): self.data[k] = data[k] def read(self, id): """Read input from the selected device.""" return self.data def close(self, id): return def devices(self): """List all the available devices.""" dev = [] # According to API doc only 0 or 1 devices is supported # logger.info("Devs: {}".format(self._controller.is_connected)) if self._controller.is_connected: dev.append({"id": 0, "name": "Leapmotion"}) return dev
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Practical Issues In Database Management A Refernce For The Thinking Practitioner
Authors: Fabian Pascal
1st Edition
0201485559, 978-0201485554