

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
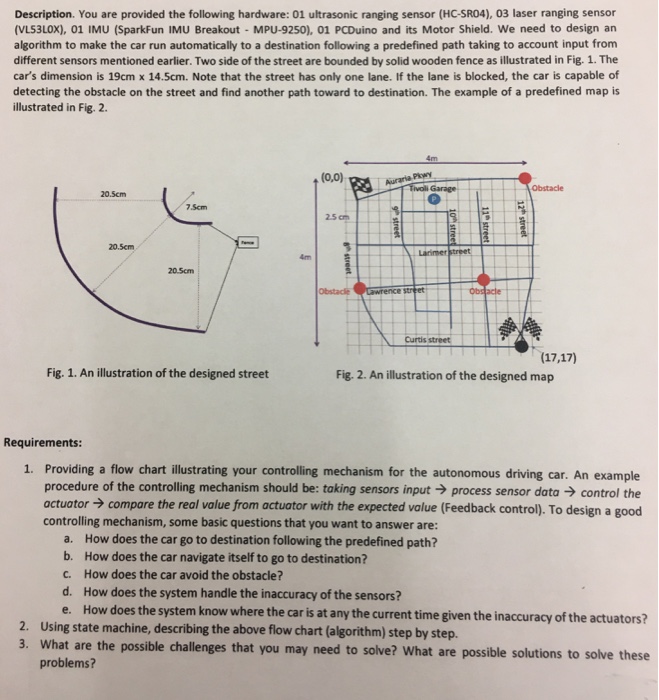
Description. You are provided the following hardware: 01 ultrasonic ranging sensor (HC-SR04), 03 laser ranging sensor (VLS3LOx), 01 IMU (SparkFun IMU Breakout-MPU-9250), 01 PCDuino and
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Beginning ASP.NET 2.0 And Databases
Authors: John Kauffman, Bradley Millington
1st Edition
0471781347, 978-0471781349