

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
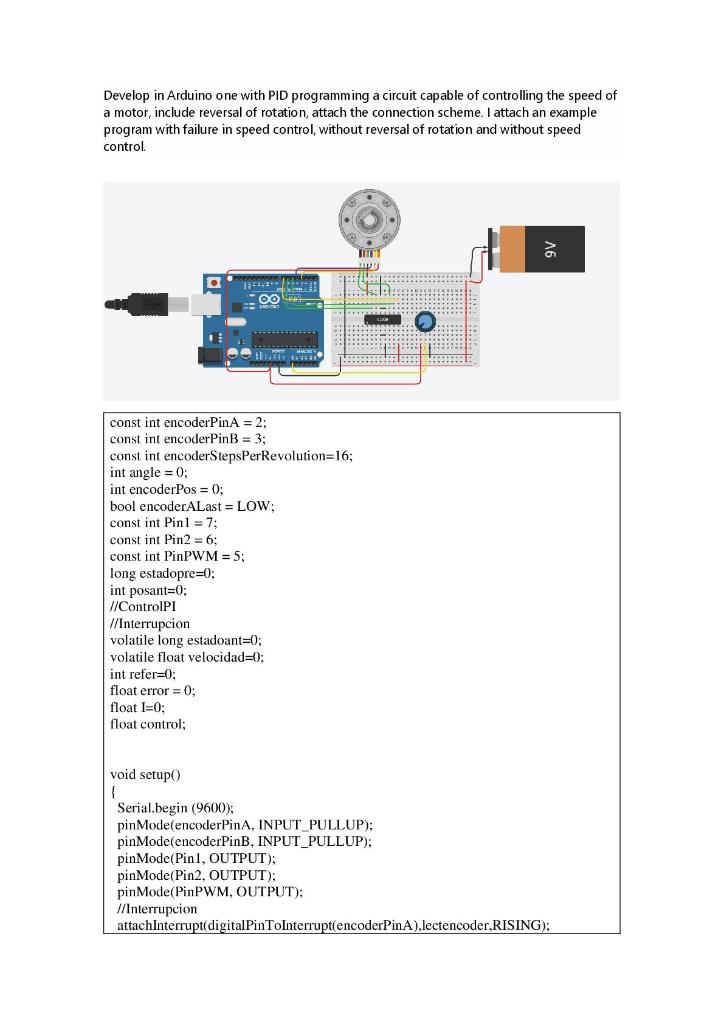
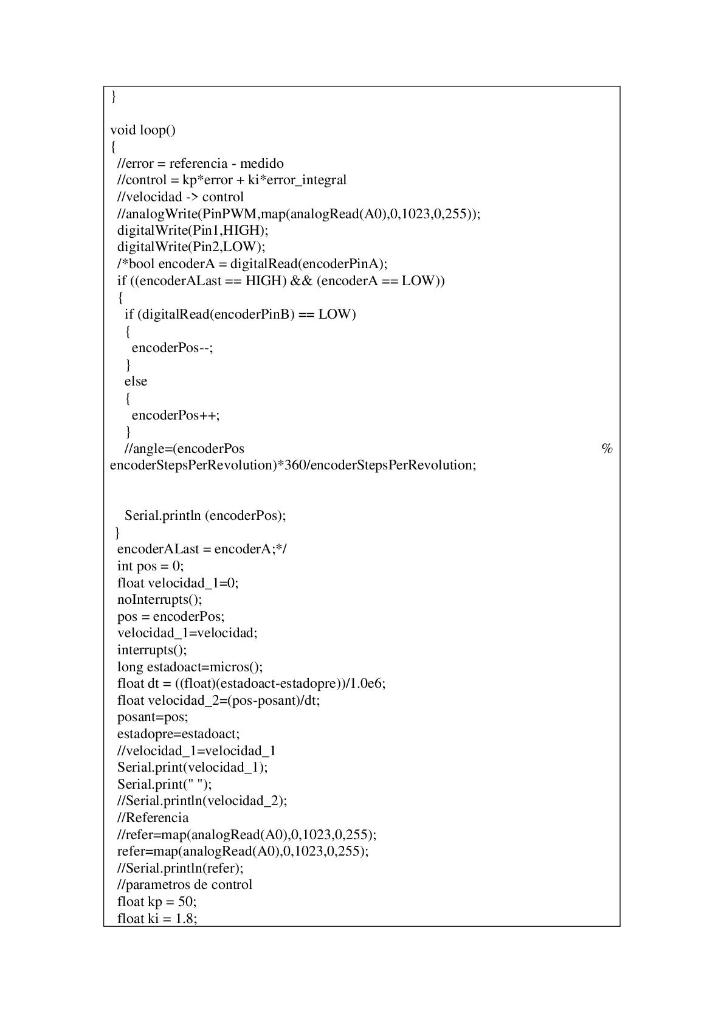
Develop in Arduino one with PID programming a circuit capable of controlling the speed of a motor, include reversal of rotation, attach the connection scheme.

Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Seven NoSQL Databases In A Week Get Up And Running With The Fundamentals And Functionalities Of Seven Of The Most Popular NoSQL Databases
Authors: Aaron Ploetz ,Devram Kandhare ,Sudarshan Kadambi ,Xun Wu
1st Edition
1787288862, 978-1787288867