

Question
Explain briefly the following concepts. [A]. From the behaviors of an intelligent system, list all differences between Mamdani- type and Sugeno-type fuzzy inferences? [B]. Construct
Explain briefly the following concepts. [A]. From the behaviors of an intelligent system, list all differences between Mamdani- type and Sugeno-type fuzzy inferences? [B]. Construct an ANFIS that is equivalent to a two-input two-rule Mamdani fuzzy model with max-min composition and centroid defuzzification? Specify how to convert the defuzzification function into node functions in the resulting ANFIS? [C]. A genetic algorithm is required to obtain the optimal values of a digital controller with four parameters (K1, K2, K3, and K4). 1. Show the coding method for the membership functions? 2. Determine the binary string of the membership chromosome, if each weight is represented by 8-bit code? 3. Give a flowchart to demonstrate the genetic algorithm operation?
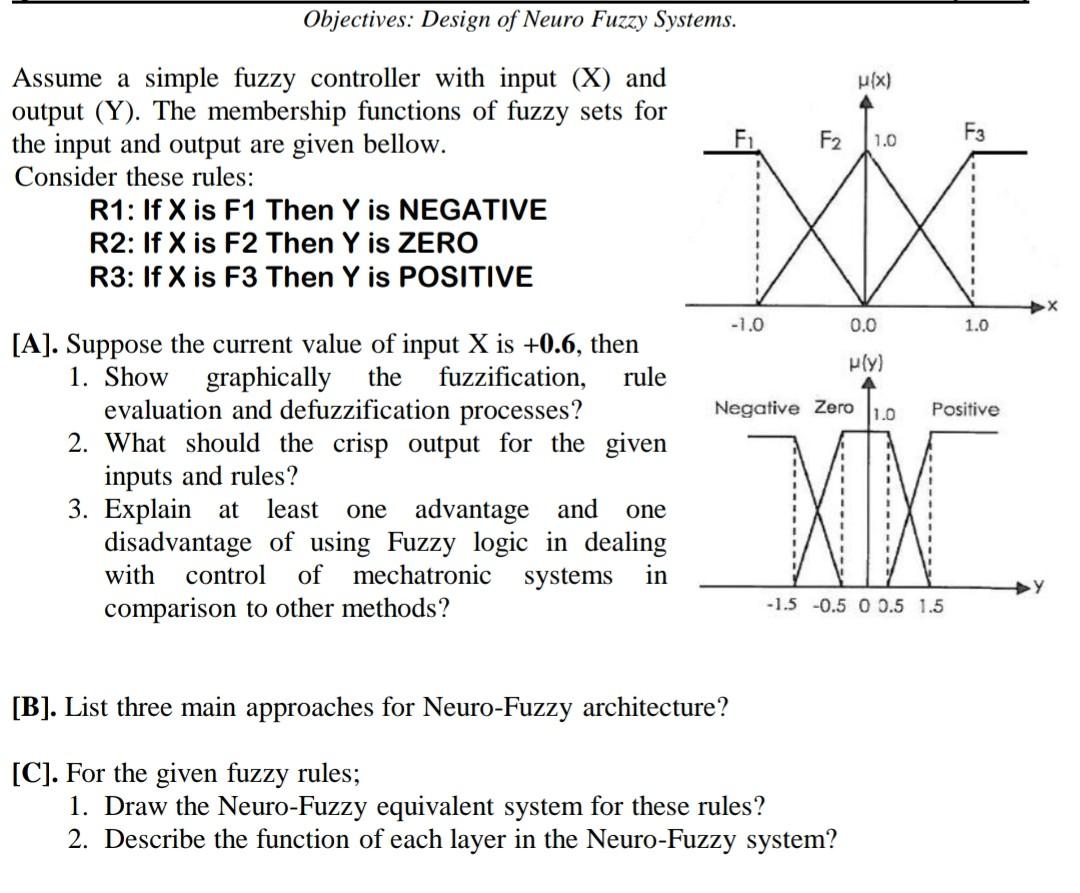
Assume a simple fuzzy controller with input (X) and output (Y). The membership functions of fuzzy sets for the input and output are given bellow. Consider these rules: R1: If X is F1 Then Y is NEGATIVE R2: If X is F2 Then Y is ZERO R3: If X is F3 Then Y is POSITIVE [A]. Suppose the current value of input X is +0.6, then 1. Show graphically the fuzzification, rule evaluation and defuzzification processes? 2. What should the crisp output for the given inputs and rules? 3. Explain at least one advantage and one disadvantage of using Fuzzy logic in dealing with control of mechatronic systems in comparison to other methods? [B]. List three main approaches for Neuro-Fuzzy architecture? [C]. For the given fuzzy rules; 1. Draw the Neuro-Fuzzy equivalent system for these rules? 2. Describe the function of each layer in the Neuro-Fuzzy system
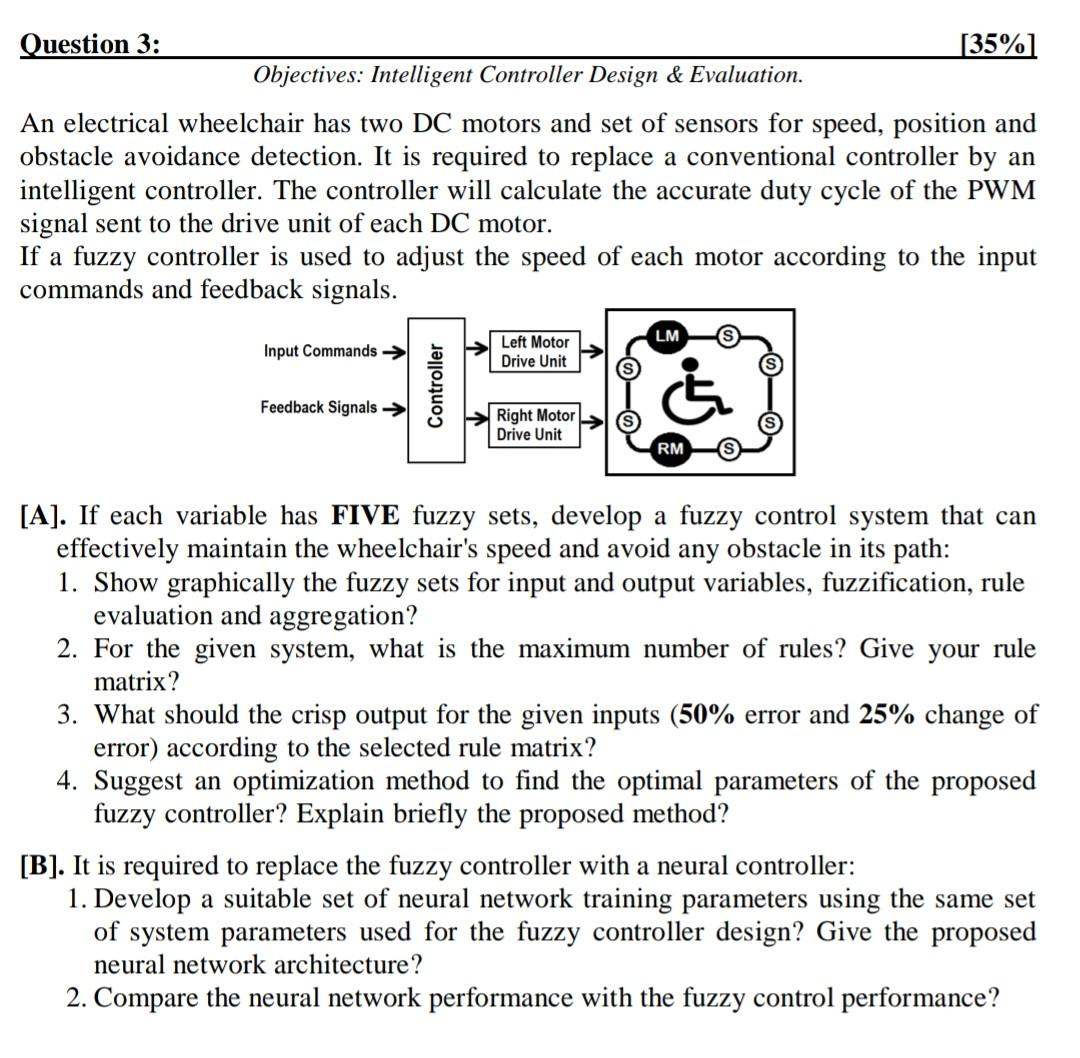
An electrical wheelchair has two DC motors and set of sensors for speed, position and obstacle avoidance detection. It is required to replace a conventional controller by an intelligent controller. The controller will calculate the accurate duty cycle of the PWM signal sent to the drive unit of each DC motor. If a fuzzy controller is used to adjust the speed of each motor according to the input commands and feedback signals. [A]. If each variable has FIVE fuzzy sets, develop a fuzzy control system that can effectively maintain the wheelchair's speed and avoid any obstacle in its path: 1. Show graphically the fuzzy sets for input and output variables, fuzzification, rule evaluation and aggregation? 2. For the given system, what is the maximum number of rules? Give your rule matrix? 3. What should the crisp output for the given inputs (50% error and 25% change of error) according to the selected rule matrix? 4. Suggest an optimization method to find the optimal parameters of the proposed fuzzy controller? Explain briefly the proposed method? [B]. It is required to replace the fuzzy controller with a neural controller: 1. Develop a suitable set of neural network training parameters using the same set of system parameters used for the fuzzy controller design? Give the proposed neural network architecture? 2. Compare the neural network performance with the fuzzy control performance?
Objectives: Basic concepts of Soft-computing Tools. Explain briefly the following concepts. [A]. From the behaviors of an intelligent system, list all differences between Mamdanitype and Sugeno-type fuzzy inferences? [B]. Construct an ANFIS that is equivalent to a two-input two-rule Mamdani fuzzy model with max-min composition and centroid defuzzification? Specify how to convert the defuzzification function into node functions in the resulting ANFIS? [C]. A genetic algorithm is required to obtain the optimal values of a digital controller with four parameters (K1,K2,K3, and K4). 1. Show the coding method for the membership functions? 2. Determine the binary string of the membership chromosome, if each weight is represented by 8-bit code? 3. Give a flowchart to demonstrate the genetic algorithm operation? Objectives: Design of Neuro Fuzzy Systems. Assume a simple fuzzy controller with input (X) and output (Y). The membership functions of fuzzy sets for the input and output are given bellow. Consider these rules: R1: If X is F1 Then Y is NEGATIVE R2: If X is F2 Then Y is ZERO R3: If X is F3 Then Y is POSITIVE [A]. Suppose the current value of input X is +0.6, then 1. Show graphically the fuzzification, rule evaluation and defuzzification processes? 2. What should the crisp output for the given inputs and rules? 3. Explain at least one advantage and one disadvantage of using Fuzzy logic in dealing with control of mechatronic systems in comparison to other methods? [B]. List three main approaches for Neuro-Fuzzy architecture? [C]. For the given fuzzy rules; 1. Draw the Neuro-Fuzzy equivalent system for these rules? 2. Describe the function of each layer in the Neuro-Fuzzy system? Objectives: Intelligent Controller Design \& Evaluation. An electrical wheelchair has two DC motors and set of sensors for speed, position and obstacle avoidance detection. It is required to replace a conventional controller by an intelligent controller. The controller will calculate the accurate duty cycle of the PWM signal sent to the drive unit of each DC motor. If a fuzzy controller is used to adjust the speed of each motor according to the input commands and feedback signals. [A]. If each variable has FIVE fuzzy sets, develop a fuzzy control system that can effectively maintain the wheelchair's speed and avoid any obstacle in its path: 1. Show graphically the fuzzy sets for input and output variables, fuzzification, rule evaluation and aggregation? 2. For the given system, what is the maximum number of rules? Give your rule matrix? 3. What should the crisp output for the given inputs (50% error and 25% change of error) according to the selected rule matrix? 4. Suggest an optimization method to find the optimal parameters of the proposed fuzzy controller? Explain briefly the proposed method? [B]. It is required to replace the fuzzy controller with a neural controller: 1. Develop a suitable set of neural network training parameters using the same set of system parameters used for the fuzzy controller design? Give the proposed neural network architecture? 2. Compare the neural network performance with the fuzzy control performanceStep by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Deductive And Object Oriented Databases Third International Conference Dood 93 Phoenix Arizona Usa December 6 8 1993 Proceedings Lncs 760
Authors: Stefano Ceri ,Katsumi Tanaka ,Shalom Tsur
1993rd Edition
3540575308, 978-3540575306